The silent revolution: Engineering the future of electric motorcycles

The roar of a gasoline engine has long been synonymous with the thrill of motorcycling. But a silent revolution is underway, driven by electrification, tighter performance targets, and the need to bring new vehicle concepts to market faster. Electric motorcycles are no longer a niche concept; they are a rapidly evolving segment that challenges engineering teams to balance range, performance, handling, and control system robustness. For engineers, simulation has become a practical way to explore these trade-offs early, reduce development risk, and accelerate innovation.
The rise of electric mobility: A global trend
Recent years have seen a surge in interest and investment in electric vehicles (EVs) across all sectors, and two-wheelers are no exception. From urban commuters to high-performance machines, electric motorcycles are gaining traction due to environmental concerns, evolving regulations, and a desire for quieter, more efficient transportation. This growing market is pushing the boundaries of engineering, demanding sophisticated solutions for everything from battery management to dynamic control. For manufacturers, this growing market creates pressure to deliver better designs in less time, making virtual prototyping and system simulation increasingly valuable for faster, more confident engineering decisions.
Simulating the ride performances: A critical engineering tool
One of the most powerful tools in an engineer’s arsenal for developing these cutting-edge machines is Simcenter Amesim. As electric motorcycles become more complex, the ability to model their behavior in a virtual environment becomes essential for understanding how mechanical systems, electrified powertrains, tire-road interaction, and controls perform together. This helps engineers:
- Accelerate development by testing and refining concepts before physical prototypes are available
- Optimize performance by balancing efficiency, range, handling, and drivability earlier in the design process
- Improve safety and confidence by analyzing dynamic behavior and stability across a wide range of riding conditions
- Reduce late-stage changes by identifying issues earlier, when they are faster and less costly to fix
A glimpse under the hood: Engineering a high-performance electric motorcycle model extended from a gasoline one
The development process starts from a Simcenter Amesim model representing a high-performance gasoline motorcycle in the L3e-A3 category. Using a validated baseline model is an efficient way to build confidence in the simulation approach before extending it toward electrified concepts.
In this example, the reference vehicle is a Yamaha Tracer 900 GT, 2018, EU4, equipped with a 6-speed manual transmission. The initial objective is to simulate the vehicle behavior and correlate the results with available test measurements, creating a solid foundation for further model development.
Test rig measurements carried out at IFP Energies nouvelles (IFPEN) consist of chassis dynamometer tests without strictly following the homologation test procedure. For further details on the testing capabilities provided by IFPEN and how they can assist clients in developing their powertrain, please visit their website.
The vehicle is run on WMTC (World Motorcycle Test Cycle), the homologation test cycle for motorcycles, and RDC (Real Driving Cycle), which is a cycle that adheres to RDE restrictions (Real Driving Emissions) but is measured on the chassis dynamometer rather than the road. For all the above reasons, this model database should be considered as a starting point rather than an absolute reference for the simulation of conventional gasoline motorcycles.
The model has been parameterized thanks to nominal reference data for performance (see figure 1). The way the data have been applied to the model and how the assumptions were made is described in the following chapters.
Vehicle parameters
Road load coefficients are set based on the certificate of conformity and are calibrated to reflect the vehicle’s mass measured before testing. Alternatively, if the road load coefficients are unknown, the vehicle configuration can be set to road where the frontal area “S” and the aerodynamic drag-force coefficient “Cx” need to be defined. This information is often available on the internet, mostly directly by the manufacturers. In that case, an assumption for the rolling resistance coefficient needs to be made as well. If data from a coast-down test are available then the vehicle configuration can be set to coast-down and these data can be used to further improve accuracy. The tire dimensions correspond to those used during the test campaign and the vehicle mass is equal to the one measured before testing.
Driver parameters
Homologation cycles, such as WMTC, have a predefined gear change pattern that is calculated for each tested vehicle and is executed during testing. However, in real driving conditions this pattern is unknown. Therefore, to be able to apply the same driver in different cycles, the “Computed by driver” method is selected in gearbox control. This way, a nominal upshift and downshift engine speed target can be defined for the gear changes and a minimum time between those changes is set to avoid oscillations. The upshift and downshift limits are set to ensure representability for most of the measured cycles.
Internal combustion engine parameters
For the internal combustion engine only the nominal values for performance (i.e. max power and max torque and the engine speed at which they are obtained) and the general characteristics (i.e. architecture, number of cylinders, bore, stroke) are known. All information is openly available by all manufacturers. To be able to model a vehicle, the engine min and max torque curve as well as the fuel consumption map are needed. This is done using the DRVICE Tables Creator tool in Simcenter Amesim.
Drivetrain
For the drivetrain each gear ratio and the final drive ratio are inserted in the model as reported in the certificate of conformity of the vehicle. Efficiency is considered constant at 90%.
Results analysis
The vehicle model is simulated over the two cycles (WMTC and RDC). The chassis dynamometer tests do not necessarily reflect the exact homologation testing conditions. To start with, it is imperative to ensure that the model correctly follows the speed profile that is used to define the driving cycle. As there are multiple cycles measured, the goal is to compare the results produced by the model versus the measurement results. This is presented below in figure 2 for a WMTC and a RDC cycle. Unfortunately, no OBD data acquisition took place during the test campaign, so the fidelity of the model is shown by comparing its results with the measured instantaneous and cumulated CO2 emissions.

Transition to the electrified model
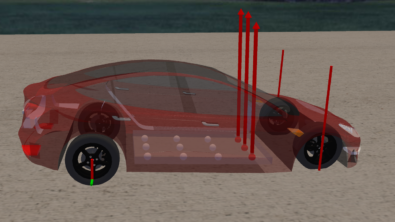
Once the baseline vehicle behavior has been validated, the model can be extended into a 3D electric motorcycle representation with a fully electrified powertrain. This step allows engineers to move from straight-line correlation toward a more complete assessment of ride performance, handling, and control behavior.
A detailed simulation model of an electric motorcycle chassis on a racetrack can provide valuable insight into real riding conditions. Such a model typically combines Simcenter Amesim capabilities for 3D mechanical systems for the chassis and Simcenter MF-Swift for motorcycle tire models.

Key components and considerations in such a model include:
Chassis design: The chassis is modeled in the virtual environment using pivot and prismatic joints to represent fork rotation, suspension travel, and swingarm movement with the right level of fidelity. Even rider lateral movement during cornering can be included. This level of detail helps engineers evaluate handling behavior earlier and make better design decisions before committing to expensive prototype iterations.

Powertrain Integration: The electric powertrain, while seemingly simple, involves crucial details. Engineers account for e-motor and chain reaction torques, applying them to the chassis with precise lateral offsets to mirror real-world chain dynamics. The model also incorporates regenerative braking capabilities of the electric motor, alongside traditional mechanical brakes for sharp turns or when the battery is fully charged.

Advanced tire modeling: The interaction between tires and the road is critical for electric motorcycle dynamics. Simulation models can use advanced tire models, such as Simcenter Tire MF-Tyre, to capture tire behavior with greater realism. This gives engineering teams better visibility into grip, stability, and cornering performance, helping them assess ride behavior with more confidence in the virtual phase.

Sophisticated control systems: To achieve the desired balance between performance, stability, and rider confidence, the electric motorcycle control strategy can be divided into two main areas:
- Longitudinal control, often used to track a target velocity profile with precision using a P.I. controller
- Lateral control, used to manage trajectory following, roll behavior, and steering response during cornering.
By simulating these control interactions early, engineers can tune stability behavior faster and evaluate control concepts before real-world testing, reducing development risk and shortening calibration loops.

Road import
The Track Import tool is used to import a test track from the GPX database provided in the Vehicle Dynamics library (Magny-Cours French Track is selected here). The option Loop track is activated to be able to simulate multiple laps of the circuit.

Then, a velocity profile is created based on this imported track, using the predefined “normal driver” behavior. Some “aggressive” or “race driver” could be selected as well to increase braking and lateral acceleration in curves.
Results
The behavior of the motorcycle can be observed in the following plots:



From virtual track to real-world innovation
By importing a racetrack and generating a velocity profile, engineers can simulate the motorcycle’s behavior under realistic riding conditions. The resulting 3D animations and performance plots, including trajectory, velocity, torque, and steering angle, make it easier to understand how the full system behaves in context.
This modeling approach gives teams a strong starting point for deeper studies into vehicle dynamics, driveline behavior, and advanced stability control development. Just as importantly, it enables more informed decisions earlier in development, when changes are faster, less costly, and more impactful.
The future is electric and engineered
The continuous development of sophisticated simulation models reflects the engineering depth behind the electric motorcycle revolution. As the market for electric two-wheelers expands, tools like Simcenter Amesim help teams explore concepts faster, improve vehicle performance, and validate control strategies earlier in the process.
In practice, this means fewer physical iterations, better insight into system behavior, and a more efficient path from concept to track-ready innovation. The future of motorcycling is not just electric; it is engineered with greater confidence through simulation.
With Simcenter Amesim, engineering teams can:
- Explore electrified motorcycle concepts earlier in development
- Better understand the interaction between chassis, tires, powertrain, and controls
- Reduce reliance on physical prototypes for early performance studies
- Tune ride performance and stability with greater confidence
- Make faster, better-informed design decisions
The motorcycle model of the Yamaha Tracer 900 GT, 2018, EU4 with real test rig correlated measurements provided by IFPEN, is part of the Simcenter Amesim 2604 release.
Want to learn how system simulation can accelerate electric vehicle development? Explore more about Simcenter Amesim and discover how virtual prototyping helps engineering teams reduce risk, improve performance, and move faster.
Want to learn more about Simcenter Amesim or try it out yourself?