Executable Digital Twin (xDT) – Part 5

What is Model-based Systems Testing (MBST)?
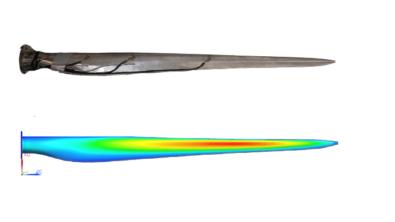
In my previous blogs, we talked about creating a Siemens executable digital twin and the benefits it can bring. One very important aspect is the validation of digital twins and executable digital twins. This important step will typically occur during the design stage when you are starting to bring a physical and virtual asset together. This usually happens during, what most people call, the hardware in the loop stage (HiL). Since HiL, historically is more ECU and software related we like to call what we do XiL, anything (X) in the loop testing. So you have something, either a human, a component, or an entire vehicle and everything else, the environment, additional components, etc. is all based on models and closing the loop.

If you have followed the previous blogs you will have learned that the result of the physical asset and the digital twin together make up the executable digital twin (xDT). So what is MBST? Well, that’s the first question I asked Dr. Roland Pastorino, take a look below to find out why it’s important and how it can help validate your digital twins.
The interview was a bit long and I didn’t want to cut anything, as it was really valuable information. So I decided to break it into two parts. Part 1 talks about what is MBST, the validation process of xDTs and how we make the connection between virtual and physical. Part 2 gives us a better understanding of real-time testing, the bottlenecks of setting up a XiL bench and we go through the eCVT test bench Roland brought with him for the interview.
The Interview – Part 1
The Interview – Part 2
Our Expert
Dr. Pastorino currently heads the Model-based System Testing team as product and research manager at Siemens Digital Industries Software in Leuven, Belgium.
Since 2015, he has been in charge of the creation of innovative products that combine Test and Simulation in support of model-based product development in the automotive, aerospace and mechanical industries markets. From 2012 to 2015, he held a postdoctoral fellowship at KU Leuven (Belgium) in the field of state estimation and x-in-the-loop technology. In 2012 he obtained his PhD in the field of real-time multibody dynamics and state estimation from University of A Coruña, Spain.
At Siemens, Dr. Pastorino is constantly exploring new technology trends to fulfill the emerging customer needs.