HiL simulation for radar-based perception systems enhances pedestrian safety
Despite the advancements in advanced driver assistance systems (ADAS), ensuring the safety of pedestrians remains a critical challenge. Accidents involving pedestrians and vehicles are alarmingly common, underscoring the need for robust solutions. This blog explores the use of HiL simulation for virtual validation of radar-based perception systems, highlighting its potential to improve pedestrian safety. With data from accident databases and regulatory bodies, we’ll examine the significance of this issue and how HiL simulation can enhance the reliability of ADAS systems.
The challenge of pedestrian safety
Statistics from accident databases and regulatory bodies reveal the pressing issue of pedestrian safety. According to the World Health Organization (WHO), over 1.1 million people die each year due to road traffic accidents, with pedestrians accounting for a significant portion of these fatalities [1]. The National Highway Traffic Safety Administration (NHTSA) reported that in the United States alone, a pedestrian was killed every 71 minutes and injured every 9 minutes in traffic crashes in 2021 [2].
Advanced driver assistance systems for safety
Advanced driver-assistance systems (ADAS) such as automated emergency braking, adaptive cruise control, park assist systems, etc. have become standard functionality in new vehicle models. The proper and safe functioning of these systems highly depends on correct sensing and perception of the traffic scene. A typical automotive sensor suite consists of several sensors, most commonly camera, lidar, radar and ultrasonic, to best support different use cases.
Radar-based perception systems, known for their reliability and ability to operate in various weather and lighting conditions, are widely used in ADAS. However, they are not fail-safe and require additional measures to ensure pedestrian safety.
Standards and frameworks for safety validation
To address the safety validation of ADAS and automated driving systems, various standards and frameworks have been established. ISO 26262 [3] sets guidelines for functional safety, including virtual testing, while the UN-ECE’s New Assessment/Test Method for Automated Driving (NATM) [4] [5] framework introduces a multi-pillar approach for safety validation. The NATM framework specifies five certification pillars, including virtual testing, to support the safety argumentation of automated vehicles.
To learn more about the autonomous vehicle’s development workflows, read this white paper [6].
Virtual testing enables the verification and validation of these ADAS systems under representative scenarios in a repeatable and time efficient manner. In addition, there can be scenarios that are difficult to realize on a test track or in real driving conditions. To fill this gap, simulations can be used to test many scenarios and to narrow down to a selection of relevant scenarios for physical testing, thus reducing the test effort [7].
Building trust in simulation results
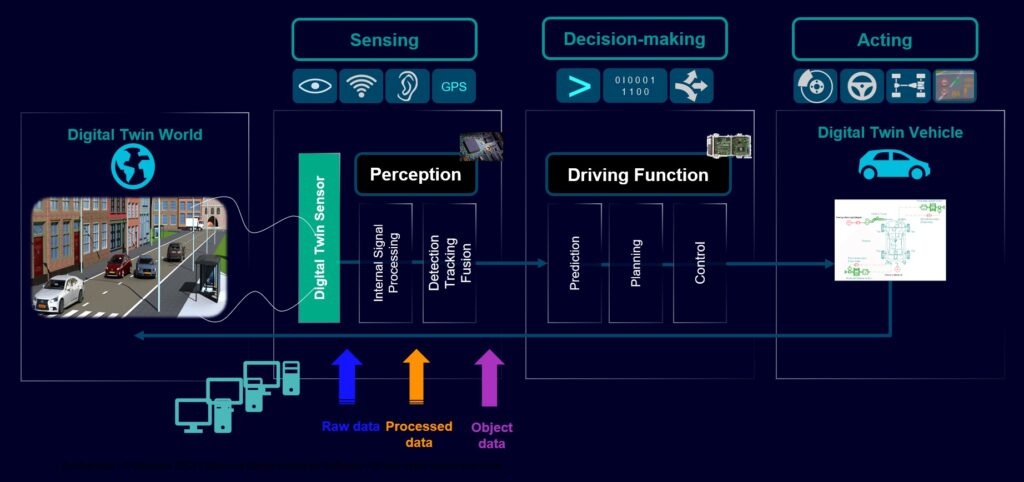
To establish trust in simulation as an alternative to physical testing, three key components must be considered: the physical device, the world, and the simulation engine. Simulating the physical device allows for correlation with real-life sensors, considering hardware configurations, physical properties, noise, and patterns. Representing the world accurately in the simulation involves geometric details, material properties, and environmental factors. The simulation engine, based on real-life physical equations, generates precise sensor outputs.
Simcenter Prescan, a leading simulation platform, offers physics-based sensor models that accurately replicate the behavior of real sensors. By combining these models with validated world and environment simulations, Simcenter Prescan ensures the highest level of detail and accuracy. For more details on the verification and validation methodology for Simcenter Prescan physics-based sensor simulation, please consult the on-demand webinar [8].
The role of HiL simulation in virtual validation
In the case of virtual testing, we replace one or more physical elements with a simulation model. Virtual tests used for automated driving systems (ADS) validation can achieve different objectives, depending on the overall validation strategy and the accuracy of the underlying simulation models. HiL simulation provides a robust solution for virtual validation, enabling the testing of system reliability early in the development cycle. By simulating real-world scenarios, HiL simulation reduces costs, safety risks, and the reliance on extensive road testing.
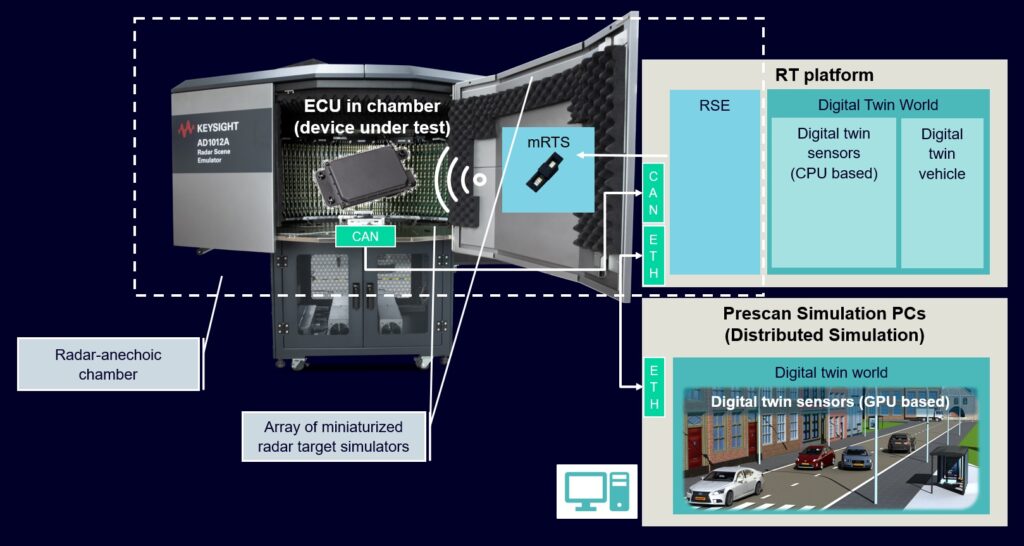
Hardware-in-the-loop (HiL) setups for testing radar-based perception systems in Advanced Driver Assistance Systems (ADAS) typically involve integrating various hardware components to simulate real-world scenarios. Sensor-in-the-Loop setups involve integrating the actual radar sensor into the testing environment. This allows for real sensor data to be processed by the ADAS system, providing a realistic testing scenario. Radar target simulator, over-the-air (OTA) emulation and radar scene emulator are some of the testing methods which allow for testing the radar sensor and radar-based perception algorithms under various environmental conditions and scenarios.
Radar OTA testing in a HiL environment has been a challenge for the industry due to limitations in real-time capable physics-based sensor models. Each radome, bumper, mounting position, and paint for different vehicles changes the performance and perception of radars in their final location and function. Traditional RTS hardware may not provide the required fidelity for OTA testing, leading to issues being discovered during field tests.
Partnering for trustworthy virtual testing
Siemens Simcenter Prescan [9], in collaboration with Keysight, offers a reliable and realistic solution for testing and developing radar-based perception systems in the automotive industry. With Simcenter Prescan’s Physics-Based Radar (PBR) simulation, which is based on ray-tracing techniques, users can simulate automotive radar systems in realistic traffic environments. This simulation includes core features like ghost effects and micro-doppler, ensuring accurate testing of radar sensors. Additionally, Keysight’s Radar Scene Emulator (RSE) allows for repeatable and reliable testing of radar characteristics and algorithms using real sensors inside an OTA test chamber [10]. By combining these technologies, developers, testers, integrators, and authorities can have confidence in the results and gain deep insights into physical setup variants. This partnership offers a trustworthy alternative for enhancing pedestrian safety through the testing and development of radar-based perception systems.
Conclusion
HiL simulation is a powerful tool for virtual validation of radar-based perception systems, addressing the critical challenge of pedestrian safety. By accurately simulating sensor behavior and the surrounding environment, virtual testing enhances real-world testing, reducing costs and safety risks. With high-quality test data and reliable simulation platforms like Simcenter Prescan, the path to safer and more reliable ADAS systems becomes clearer. By leveraging HiL simulation, we can work towards a future where pedestrian safety is prioritized and accidents are minimized.
Resources
[1] WHO fact sheet on road traffic injuries, December 2023
[2] NHTSA report on pedestrian safety, 2021
[3] ISO 26262 Road vehicles – Functional safety, second edition 2018
[4] UN-ECE (United nations economic commission for Europe) The New Assessment/Test Method for automated driving (NATM), April 2022
[5] UN-ECE Guidelines and recommendations concerning safety requirements for automated driving systems, June 2022
[6] Multi-pillar approach for safety validation of AVs, Siemens Digital Industries Software, January 2024,
[7] Generating scenarios for ADAS and AVs, Siemens Digital Industries Software, August 2022,
[8] Verification and validation of physics-based sensor simulation, Siemens Digital Industries Software, 2021,
[9] Simcenter Prescan description
[10] Keysight website


