Two new major physics based sensors in Simcenter Prescan 2019.1

Simcenter Prescan announces the release of version 2019.1. This release proudly announces the introduction of two new major Physics Based Sensors:
-
- The Physics Based Camera based on the Unreal Gaming Engine
-
- The Physics Based Radar model
In addition, a new ground truth sensor for real-time applications has been introduced and is called the Object List Provider. Improvements to Prescan’s world generation capabilities, new EuroNCAP 2020 scenarios and the Data Model API round up the list of exciting features for this new release.

Physics Based Camera (based on Unreal render engine)
A new Physics Based Camera based on the Unreal Engine is now available. This new Physics Based Camera sensor provides the following functionality:
-
- Complete sensor & optics pipeline simulation
-
- Fisheye camera simulation
-
- Support for rain simulation
-
- Improved performance (compared to original Physics Based Camera)
Additionally, the use of the Unreal gaming Engine provides the following advantages:
-
- Improved shadows
-
- Improved reflections
-
- Improved shading
-
- Improved motion blur
-
- Improved grass models
A viewer based on the Unreal Engine is also now available as part of this release.

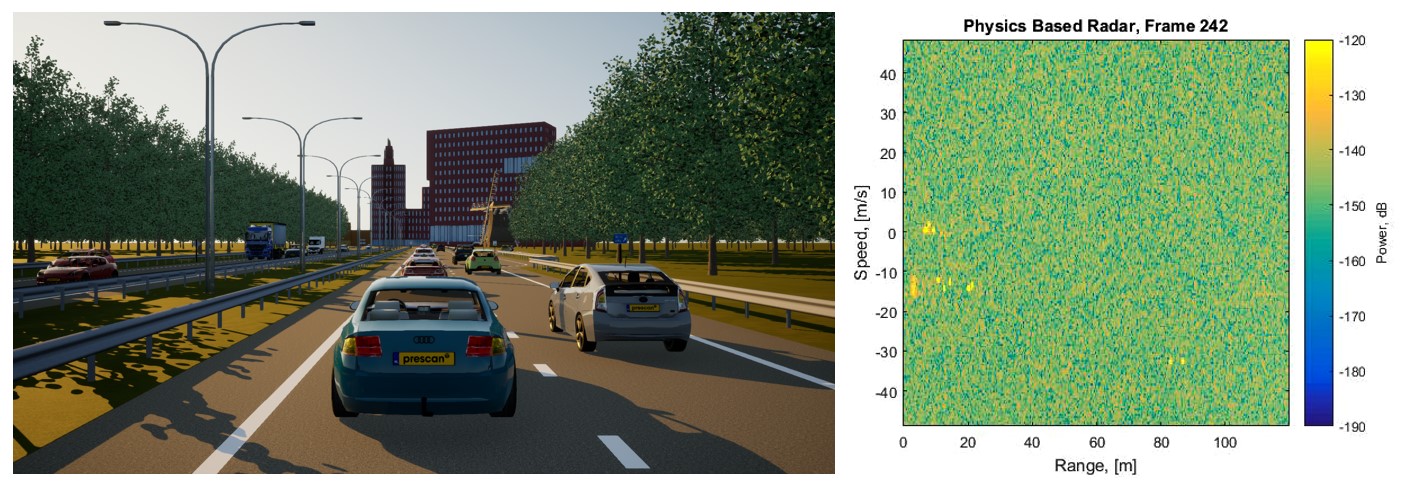
Physics Based Radar model
A new Physics Based Radar model is now officially released. This new Physics Based Radar model allows users to generate raw data output (e.g. ADC data) to help with the testing and development of signal processing algorithms, and new automotive radar systems. Validation of this new radar model has been performed with Tier 2 and Tier 1 manufacturers, ensuring that the simulation output matches very closely to measurements gathered in real life with radar sensors.
Object List Provider
The Object List Provider is a new ground truth sensor that provides complete information about all objects in an experiment. This sensor is ideal for experiments that require access to ground truth information and need to run in real-time or faster than real-time.
The information provided by the sensor includes the unique id, numerical id, object type id, origin, orientation, centre of gravity, centre of bounding box, bounding box size, and corners of the bounding box. The new sensor can be enabled in general settings and adds a new block to the compilation sheet with a single output port which outputs an array of buses (one bus for each detected object).
World modelling improvements
Simcenter Prescan continues to extend the OpenDRIVE support. In the current 2019.1 release the following OpenDRIVE 1.4H features are added to the supported items:
-
- Pedestrian crossings
-
- Stop lines
-
- Constant Road shape
-
- Asphalt colouring
Additionally, the following sensors now work in conjunction with OpenDRIVE roads:
-
- Lane line labels are visible with the Advances Lane Marker Sensor
-
- Lane marker is now visible in the ISS in yellow
Data Model API
Simcenter Prescan announces the release of the MATLAB Data Model API 0.9. The Data Model API is a powerful scripting tool that allows for fast and reliable Test Automation as well as GUI-less operation of Prescan.
The MATLAB Data Model API 0.9 release showcases the capabilities of the Data Model API, that will be progressively improved in the subsequent releases, allowing full control of the experiment design, creation and execution via scripting.
Related source: Prescan video

Comments
Comments are closed.