What’s new in Simcenter Prescan 2019.3?

Simcenter Prescan, the best physics-based simulation platform for testing and development of automated vehicles, announces the release of version 2019.3. This release proudly announces the introduction of a C++ simulation interface, the OpenSCENARIO importer, a Beta version of the Physics based lidar plugin and many other new features and updates.
Users can continue to create the experiments in the Prescan GUI, or additionally, may also choose to use the DMAPI to import roads and scenarios, create models and attach sensors all directly from their C++ code. Both cases are supported and can be executed in our new C++ interface.
Prescan C++ simulation interface
With release 2019.3, Prescan introduces the capability to execute a full simulation from a C++ interface. This means that, users now can choose to run their simulations on Matlab and Simulink or on a C++ controller.
The C++ controller has been developed to allow low-level access to users: from the vehicle positions, velocities and accelerations to the frequency at which each module is called. Furthermore, with release 2019.3, Prescan introduces the Data Model API (DMAPI) in C++ language, designed to seamlessly integrate and work with our new C++ execution interface.
With the C++ Prescan simulation users can easily interface with other software packages with C++ APIs such as Amesim, ROS, Autoware and CarSim.
New NCAP models

OpenDRIVE example
Prescan 2019.3 is shipped with an OpenDRIVE example file of Atlatec.

OpenSCENARIO support
OpenSCENARIO is the simulation industry standard for event-based scenario description. With Prescan 2019.3 we release the OpenSCENARIO importer for Prescan, supporting event-based lane-changes, breaking and constant speed events.
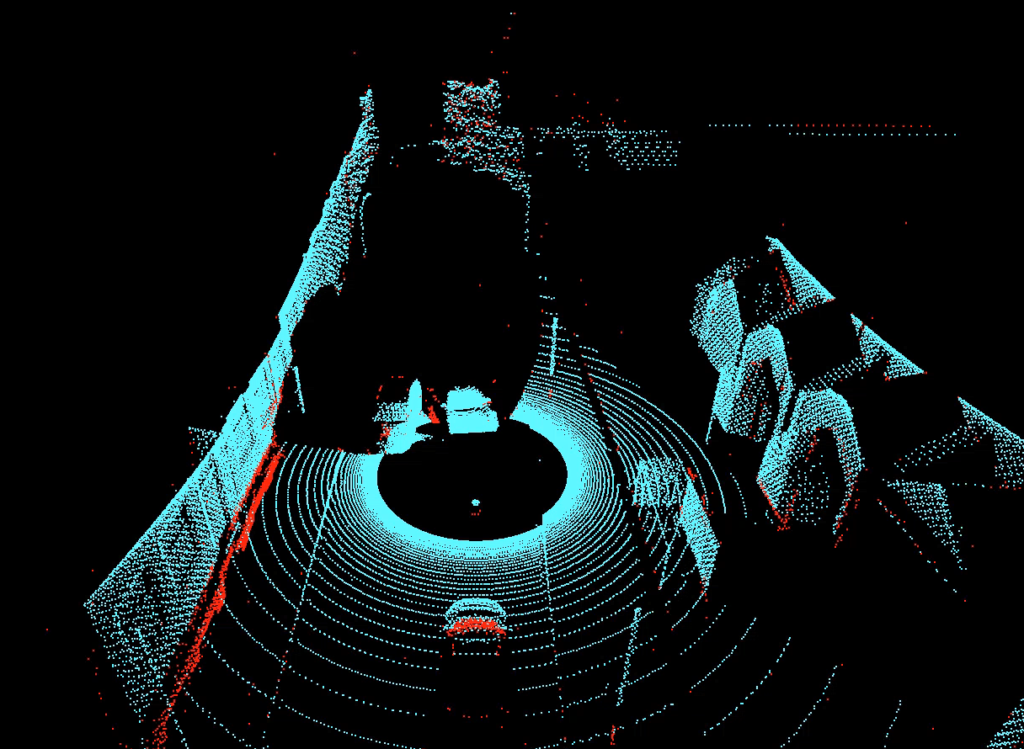
Beta of the physics based lidar plugin
A beta version of the physics based lidar plugin is now available. This new sensor is built based on ray-tracing technology and provides very accurate and realistic raw data (point clouds) based on energy returned (including multiple returns), time effects, and the ability to model real lidars based on specific scan patterns and beam properties.
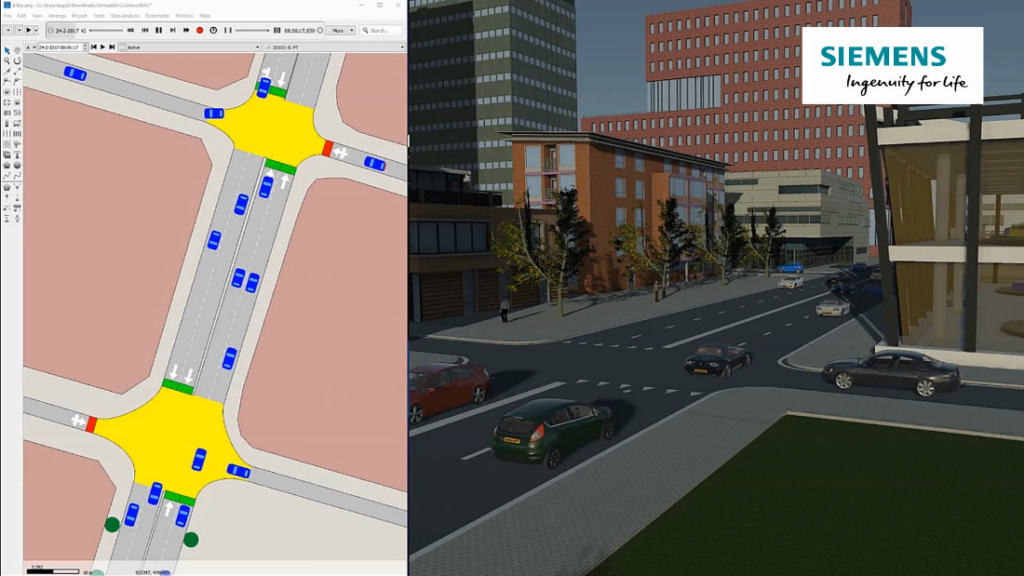
Aimsun plugin
Using the Aimsun plugin, traffic flows can be generated in Prescan by co-simulation with Aimsun. This allows for the automatic generation of human-behavior based traffic, after which the effect of the ego vehicle with respect to traffic flows, can be analyzed.
Simcenter Prescan has announced previous releases which contain the following features:
Release 2019.1:
In Release 2019.1, Simcenter Prescan introduced the new Unreal Viewer and Unreal Physics Based Camera. With the Unreal Viewer Prescan is backed by the visualization technology of the Unreal gaming engine. Additionally, the Unreal Physics Based Camera merges the physics-based pipeline of Prescan sensors and the accurate and realistic visualization capabilities of Unreal in the visual spectrum.
For more detailed information about this release, read our blogpost and/or watch the video.
Release 2019.2:
Release 2019.2 for Simcenter Prescan expanded the Unreal Physics Based Camera functionality and introduced many new data model API functions, enabling users to create their experiments them from, program their test automation and execute them in a headless mode.
Read more about these functionalities in our blogpost.
For more information about Simcenter Prescan, please visit our website.


