D-Cubed 2D Components sit at the core of cutting-edge CAD/CAM/CAE and AEC software applications, enabling advanced sketching capabilities and transforming…
AI design and engineering assistants are rapidly becoming a key area of innovation, transforming how products are conceptualized and developed…
We’re all set to host our third PLM Components Innovation Conference in Boston, MA next week. Siemens Digital Industries Software…
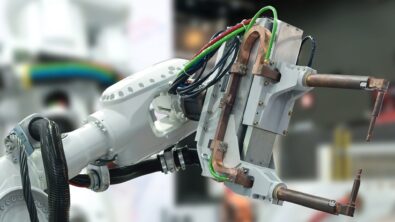
KineoWorks is core software technology driving fast, collision-free motion for industrial robotics applications from Siemens and many other manufacturing solution…
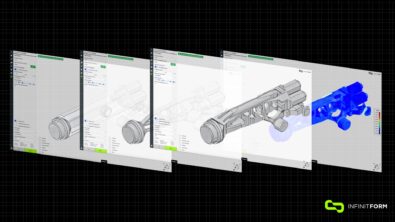
D-Cubed 3D components are integrated by software developers to add 3D modeling capabilities to CAD/CAM/CAE and AEC software applications. These…
D-Cubed 2D components are integrated by software developers to add functionality to the sketching environment of CAD/CAM/CAE and AEC software…
Read CIMdata’s new white paper about PLM Components – Siemens’ open toolkits for 3D modeling, simulation, visualization and collaboration.
Demand for more efficient robotics manufacturing While industrial robots are well-established in automated manufacturing processes like pick-and-place, spot welding and…