Hybrid electric vehicles architecture and energy management: hofer powertrain´s revolutionary approach

In the pursuit of more fuel-efficient, higher-performance, and sustainable mobility solutions, hofer powertrain has developed a dedicated methodology to optimize and validate the performance of dual-parallel Hybrid Electric Vehicles (HEVs) equipped with Dedicated Hybrid Transmissions (DHTs). This blog article outlines hofer’s simulation-driven approach, leveraging Siemens’ Simcenter Amesim and Simcenter HEEDS to engineer efficient, high-performance hybrid powertrains.
Introduction

The Dedicated Hybrid Transmission (DHT) system represents a crucial advancement in powertrain technology. Engineered specifically for hybrid applications, it delivers optimized power delivery mechanisms while enabling enhanced regenerative braking capabilities. The system ensures smooth gear transitions and rapid acceleration response.
To optimize the hybrid electric powertrain components sizing and the energy management system controlling it, hofer powertrain used Simcenter Amesim and Simcenter HEEDS capabilities. Simulation results demonstrated significant improvements in fuel efficiency, acceleration performance, and state of charge balance, confirming the effectiveness of the optimization process. This integrated workflow provides an automated and scalable framework for designing energy-efficient, high-performance hybrid powertrains, contributing to sustainable and environmentally friendly automotive solutions.
Approaches to Energy Management Strategies (EMS) for HEV
The key to engineering efficient HEV powertrains mostly lies in the energy management control strategies. There are so many degrees of freedom that having the best hardware is not sufficient to have the most fuel-efficient powertrain. Hence the energy management strategy that handles the split between internal combustion energy and electric energy is crucial. The figure below shows a classification of energy management strategies from Panday et al.

Technology (2014).
In this case, hofer powertrain chose to use both Pontryagin Minimum Principle (for offline optimization) and Equivalent Consumption Minimization Strategy (for online, real-time optimization), because readily available in Simcenter Amesim’ Hybrid Optimization Tool (HOT).
Methodology for powertrain optimization
The method for optimizing both the energy management strategy and the components sizing is shown in this figure:

For each powertrain sizing/design, the optimal control is computed using HOT. Simcenter HEEDS will then vary the design and call HOT with the new design parameters so that the corresponding optimal control is recalculated. Once the optimization is finished, the optimum combination of powertrain design and controller is generated in Simcenter Amesim with the corresponding ECMS controller.
This model can be further used for other studies such as thermal management, real-driving conditions, aging, failure mode and effect analysis, …
Implementation of baseline design in Hybrid Optimization Tool

In this study, HOT is applied to a dual-parallel hybrid electric vehicle, equipped with a 1.2-liter internal combustion engine.
HOT follows a structured, multi-step process to model, simulate, and optimize hybrid powertrains. The methodology includes six core stages: Architecture definition, Parameterization, Strategy definition, Test cases definition, Computation (Control optimization), and Post-Processing.
The baseline results are shown in the figure below over a WLTC driving cycle.


This baseline model serves as the foundation for the next stage of the study, where further enhancements will be explored through dedicated hybrid transmission synthesis and component sizing optimization using Simcenter HEEDS.
Powertrain optimization in Simcenter HEEDS
For this study, Simcenter HEEDS is used to optimize the hybrid powertrain system, leveraging a Python scripted HOT model as the foundation for component synthesis and system refinement.
The optimization statement is shown in the table below:
| Objective | Minimize corrected fuel consumption |
| Subject to constraints | Maximum vehicle speed without battery power ≥ 180 km/h Maximum vehicle speed without battery power ≤ 252 km/h Duration of 0 to 100 km/h ≥ 5.5s Duration of 0 to 100 km/h ≤ 9.8s |
| By modifying | 0.62 ≤ motor power scaling factor ≤ 1.1 0.32 ≤ generator power scaling factor ≤ 1.1 3.6 ≤ Rn gear ratio 1 ≤ 6 2.5 ≤ Rn gear ratio 2 ≤ 3.6 1 ≤ number of battery cells in parallel ≤ 2 5A ≤ max charge current ≤ 50A 15A ≤ max discharge current ≤ 100A 36 km/h ≤ max vehicle speed in pure electric mode ≤ 144 km/h 20% ≤ initial state of charge ≤ 90% |
During the optimization process, a total of 250 designs were explored to identify the optimal configuration for minimizing corrected fuel consumption within the defined constraints. Of these, 235 designs were feasible, successfully satisfying all constraints, while 14 were classified as infeasible due to violations of one or more constraints.
The figure below illustrates the objective history of corrected fuel consumption throughout the optimization process.

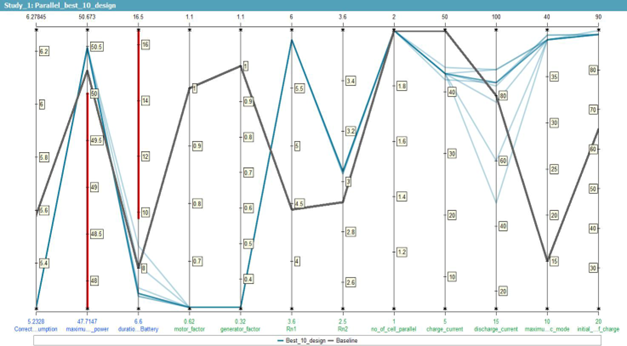
The parallel plot below illustrates the top 10 designs with the lowest corrected fuel consumption, compared to the baseline design shown as a grey line. Among these, the best-performing design — depicted by the dark blue line — was selected for achieving the lowest corrected fuel consumption of 5.23 L/100 km.
Finally, here is a summary of the optimal design compared to the baseline design:
| Parameter | Baseline design | Optimized design | Improvement |
|---|---|---|---|
| Corrected fuel consumption (L/100km) | 5.58 | 5.23 | -6.3 % |
| Duration of 0 to 100 km/h (s) | 8 | 7 | -12.5 % |
| Maximum vehicle speed without battery power (km/h) | 180.9 | 181.8 | 0.5 % |
| Maximum vehicle speed in pure electric mode (km/h) | 54 | 140.4 | 160 % |
| Motor power scaling factor | 1 | 0.62 | -38 % |
| Generator power scaling factor | 1 | 0.32 | -68 % |
| Rn1 (First gear ratio) | 4.448 | 5.920 | 33.1 % |
| Rn2 (Second gear ratio) | 2.918 | 3.040 | 4.2 % |
| Number of battery cells in parallel | 2 | 2 | 0.0 % |
| Max charge current (A) | 50 | 43 | -14 % |
| Max discharge current (A) | 80 | 88 | 10 % |

Validation of the optimized design
With the Simcenter HEEDS optimization completed, the next step in the methodology involves analyzing the optimized design real-world performances within the Simcenter Amesim environment.
From HOT, the corresponding Simcenter Amesim model is automatically generated.

This implies a transition from a backward modeling approach in HOT (quasi-static) to a forward modeling approach in Simcenter Amesim (dynamic, including a driver regulation). A WLTC driving cycle is simulated and the SOC trajectories are compared between HOT and Simcenter Amesim.

The SOC behavior in both backward and forward modeling is well-aligned, verifying that the energy management system effectively maintains a charge-sustaining operation. The small variations observed are expected due to transient effects in forward modeling, which are not present in backward modeling.
The study demonstrates the hybrid powertrain optimization process by comparing backward and forward modeling approaches. The corrected fuel consumption values and 0–100 km/h durations are consistent across modeling types. Backward modeling shows significant improvement in fuel consumption, reducing it from 5.58 L/100 km (baseline) to 5.23 L/100 km (optimized design) while achieving a 0–100 km/h duration of 7.00 seconds. Forward modeling further validates this performance with a corrected fuel consumption of 5.24 L/100 km and a 0–100 km/h duration of 7.75 seconds, accounting for transient effects like gear shifting and driver response time. The results are summarized in the table below.
| Objective | Baseline design (backward model) | Optimized design (backward model) | Optimized design (forward model) |
|---|---|---|---|
| Corrected fuel consumption (L/100km) | 5.58 | 5.23 | 5.24 |
| Duration of 0 to 100 km/h (s) | 8 | 7 | 7.75 |
Summary and outlook
hofer powertrain’s research represents a significant leap forward in hybrid vehicle technology optimization, enabling the development of various efficiency and performance oriented strategies.
Their comprehensive approach to energy management, combining advanced optimization algorithms with practical engineering solutions provided promising results. These findings not only validate the current methodology but also pave the way for future improvements and research in hybrid vehicle powertrain design.
In the future, incorporating battery aging modeling into the optimization process could address the dynamic changes in battery performance over time. Furthermore, research on next-generation modular powertrain architectures and renewable energy integration could lead to even greater advancements in fuel efficiency and sustainability.
Source: Aditya Manjappa Gowda, TU RP / hofer powertrain, Automated Synthesis of Dedicated Hybrid Transmission (DHT) and Efficient Hybrid Strategy Implementation for Consumption Assessment, February 18, 2025


