Advancing UAV technology and safety through digital twin simulation

With the rising demands in a proliferating UAV market, digital twin technology plays a crucial role in advancing technology, ensuring the safety and efficiency of unmanned aerial vehicles.
It offers cost-effectiveness and time-saving capabilities by simulating a multitude of scenarios and evaluating UAV performance without the need for physical prototypes. In this manner, digital twin technology accelerates the development process, reduces production costs, and enables rapid design iteration. It additionally allows engineers to assess UAV performance in critical situations, where real testing is not possible. By simulating different scenarios and environments, potential risks can be identified and addressed, enhancing operational safety.

In collaboration with the National Institute for Aviation Research (NIAR) from Wichita State University, a Simcenter simulation framework was developed for evaluating the performance and operation of UAVs. This framework extended an existing X-Plane simulator setup at NIAR based on AVET flying physics library, with Simcenter Prescan to enable sensor simulation.
Using Simcenter Prescan, we created a virtual environment where the sensors attached to the UAV are modeled. This virtual environment is generated based on satellite data, allowing us to create a 3D representation of the actual environment for sensor simulation.

In this case, a model of the KSU UAS test site in Salina, Kansas, with a size of more than 200 km2 was created (Figure 2). By utilizing this virtual environment, we can test the UAV’s performance in environment conditions close to its real operation.
Pilot-in-the-loop simulation
Pilot-in-the-loop (PiL) simulations offer the advantage of testing real-time human interaction and operational safety. Within the proposed framework, a pilot can steer an aircraft and obtain the sensor output in real-time. The state-of-the-art aircraft will be computed by NIAR’s physics-based flight library coupled with X-Plane 12 and will be passed to Simcenter Prescan using its C++ interface, updating the position and orientation of the aircraft with its mounted sensors in the environment. This process needs to be performed at a high frequency in order to offer a smooth simulation.
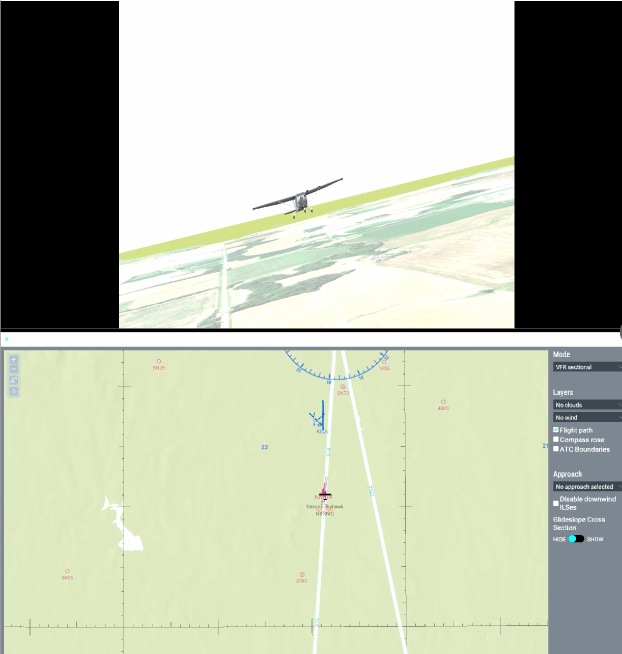
Shown below are the outputs of the RGB camera and light detection and ranging (LiDAR) sensors attached to the vehicle, which are running at 40 Hz and 10 Hz respectively. The simulation consisted of operating the UAV in the test site with an unexpected aircraft intrusion. This intruder aircraft is flying at high velocity toward the piloted UAV. On the left of Figure 3, the LiDAR output is displayed; on the top right, the camera output; and bottom right the X-Plane 12 map is shown.
In this simulation, we assess the sensor requirements necessary for timely detection of intruder aircraft, enabling a fast response. By integrating additional algorithms, such as detect and avoid, we are able to validate their effectiveness in such critical situations. Additionally, an important aspect of regulatory safety is maintaining a visual line of sight (VLOS). An external observer with a VR headset was included in the simulation, which could track the operation of the UAV during the simulated scenarios. By maintaining a clear VLOS, operators can ensure the safe operation of UAVs, minimizing risks and maximizing the safety of both the UAV and the surrounding environment.
The incorporation of Simcenter Prescan into the NIAR flight simulator improves the simulation capabilities, enabling comprehensive assessments of sensor requirements, mission fulfillment and safety. It allows real-time visualization of sensor outputs, providing direct feedback on their operational performance during the simulation.
You might also be interested in…
Urban air mobility
Fly it before you build it: design aircraft while targeting certification

eVTOL aerodynamic design through digitalization


