Supporting the development of autonomous urban air mobility vehicles

Autonomous urban air mobility vehicles will revolutionize the urban mobility market. A digital twin is invaluable as part of an efficient development process that ensures a safe product.
Safe operations are key when it comes to flying autonomous urban air mobility vehicles. Validating the flight management system for as many flight scenarios and operational conditions as possible is crucial. This is why the digital twin of the flight management system must include simulation models of both : aircraft and environment.
A simulation framework for autonomous urban air mobility vehicles
This study evaluated whether a simulation framework with a proven track record in the development of Automated Driving Systems for ground vehicles is able to support the development of automated flight management systems in an integrated manner. The framework includes 3 coupled software packages performing time-domain simulations.
- Simcenter Amesim® models the flight dynamics, the propulsion systems and the navigation control loops.
- Simcenter Prescan® models an urban environment and exteroceptive sensors that detect features in the environment (e.g. camera, lidar)
- Simulink® connects both,Simcenter Amesim and Simcenter Prescan.
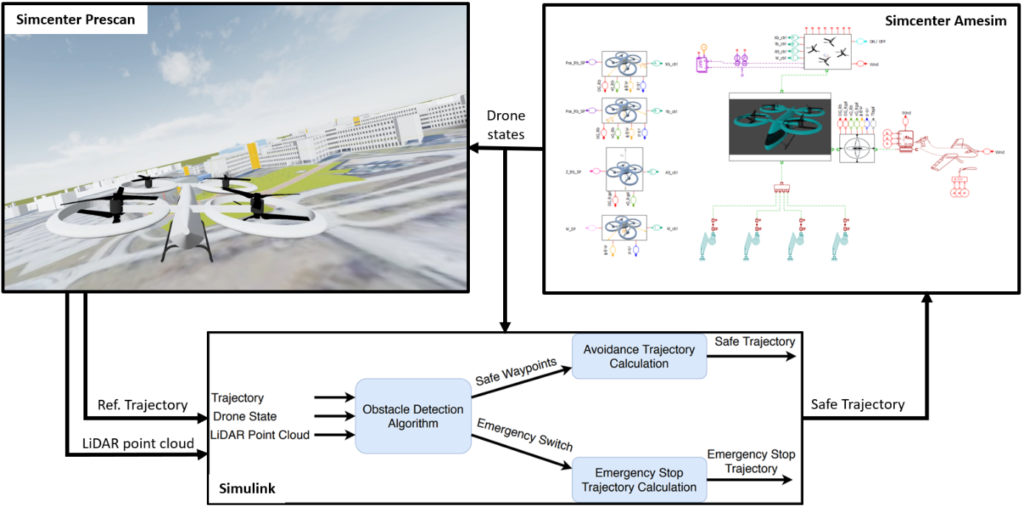
The figure below displays the simulation framework. The states of the drone are passed from Simcenter Amesim to Simcenter Prescan to position the aircraft geometry and sensors with respect to the environment. Next, Simcenter Prescan computes the sensor data and provides the reference trajectory information. The object detection and safe trajectory planning algorithms uses this input to compute a safe trajectory. This is then passed to Simcenter Amesim.
Modeling the urban air mobility vehicle and the environment
To demonstrate this approach, the study makes use of an all-electric, four-seater, octocopter with realistic design parameters. The urban air mobility vehicle has 4 sets of 2 ducted counter-rotating propellers. Each propeller is coupled with an electric motor of 200kW that is based on the former Siemens SP-200D motor. A battery with a capacity of 110kWh powers the aircraft. As a result, the vehicle has an autonomy of 15min with a cruise speed of 120km/h.
The Simcenter Amesim model contains 8 propeller models coupled with subsequently 8 models of phase modulated synchronous motors. Together with a 6 degree of freedom model and simplified aerodynamic model, it provides the flight dynamics behavior. The system model also includes a battery, ground contract elements and PID control loops. The PID control loops make the aircraft follow the safe trajectory.
We deployed a high-fidelity model of the Siemens Perlach Campus near Munich is as urban environment in Simcenter Prescan. The Simcenter Prescan lidar sensor model represents a high performance commercial lidar system providing point cloud information of the environment. Finally, we implemented a simplified obstacle detection and evasion algorithm in Simulink .
Simulating multiple collision scenarios
The study simulated multiple collision scenarios and to assess obstacle detection and evasion functions using the simulation framework. The scenarios include a tower crane with different orientations on the planned flight path.
We computed different trajectories depending on the orientation of the crane. When the crane is positioned perpendicular across the flight path, it is detected well in advance. A gentile diversion over the crane ensured safe operations. However, when the crane is aligned with the flight path, it is detected very late. An aggressive lateral maneuver can evade the obstacle. In this event, the system simulation exposed that the propulsion systems had to operate close to their limits.
The results also display the aircraft acceleration levels for the aircraft’s structural assessment and assessment of passenger comfort during the evasion maneuvers.
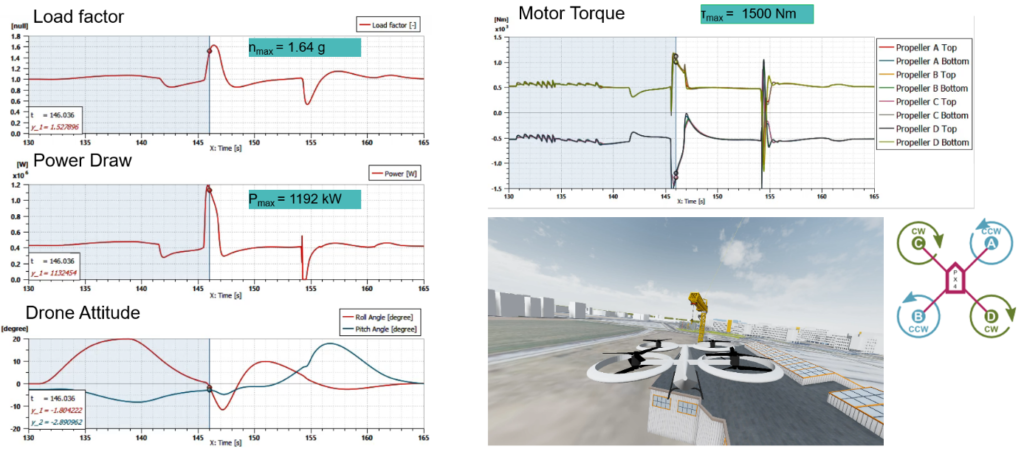
Figure 3. System simulation results of obstacle evasion maneuver
This study concludes that Simcenter Amesim together with Simcenter Prescan includes all required capabilities to support the development and validation of automated flight functions of autonomous urban air mobility vehicles.
We plan to extend this study with
- human body motion simulations of passengers modeled with Simcenter Madymo.
- the coupling with aircraft dynamics simulated with Simcenter 3D Motion.
- the prediction of fly-over noise using Simcenter 3D Acoustics.
Jan Verheyen performed the above study as part of his internship at Siemens Digital Industries Software in Leuven, Belgium. Jan is a master student aerospace engineering from the control and simulation department of the Delft University of Technology.
For more info, please contact yves.lemmens@siemens.com.