News about PLM Components – software developer toolkits for building applications in 3D design and modeling, manufacturing, simulation, robotics and related applications.
Vectorworks has a proven track record of redefining what’s possible in the AEC and BIM software industry. With an exceptional…
AI design and engineering assistants are rapidly becoming a key area of innovation, transforming how products are conceptualized and developed…
The latest release of Parasolid, version 38.0, is now available. This release further extends Parasolid’s core modeling capabilities in the…
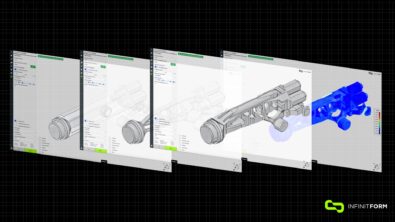
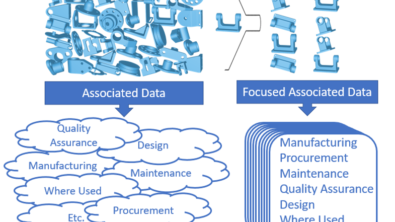
When your customers know two parts are similar a world of re-use possibilities opens The answers to many engineering questions…
Openly available JT2G0 desktop/mobile app enables viewing and interaction for geometric models based on the Parasolid XT file format
Learn about new technologies for robot optimization and their industrial use cases in our on-demand webinar
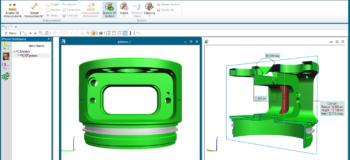
D-Cubed 3D DCM, CDM, HLM & AEM version 58 highlights
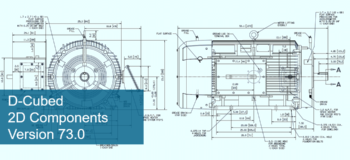
D-Cubed 2D DCM and PGM version 73.0 highlights
The final post of this series walks you through a simple pick-and-place scenario in which a robot moves objects from one conveyor to another.
In article 3 of his series, Etienne takes a closer look at trajectories that describe the movement of a kinematic system over time…
Parasolid v33.1 delivers a wide range of enhancements focussed on improving workflows for the wide range of applications built on Parasolid.
This article explains how you can easily develop a virtual robot using our interactive Kwik application.