AI Copilot: Accelerating Robotic Programming from Analysis to Commissioning
January 7, 2026
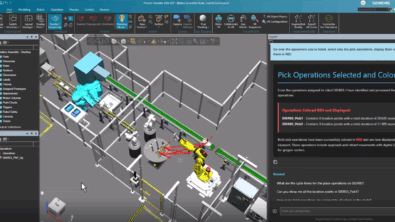
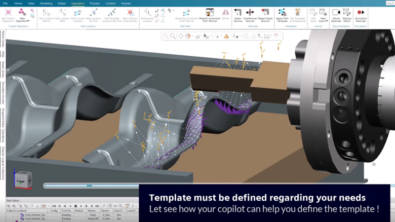
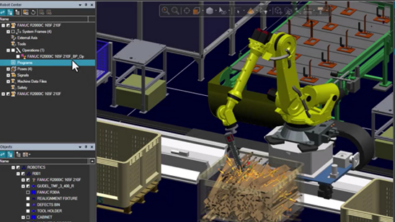
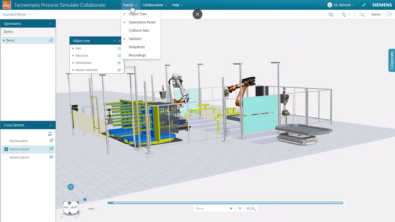
Explore how Process Simulate AI Copilot integrates AI directly into robotic programming workflows. Instead of navigating menus, building collision pairs, or deciphering error logs, engineers can simply ask — and get precise, actionable answers. The article shows how AI Copilot inventories robots, assigns tools, generates collision pairs, and summarizes operations with color-coded visualization. It also covers automated reachability checks that flag problematic targets early, and intelligent diagnostics that explain download failures and recommend fixes. By removing repetitive tasks and exposing risks sooner, Process Simulate AI Copilot helps teams validate faster, optimize cycle time, and deliver production-ready robotic cells with confidence.