Real-Driving ASEP makes you Really Driving for Pass-by Noise

Real-Driving ASEP, or RD-ASEP, is the latest extension in Supplement 7 of the well-known pass-by noise standard UN/ECE R51.03. It takes the next step in ensuring that vehicle noise emissions stay within an expected sound level when tested outside of the current well-defined target test conditions for pass-by noise testing. In short, legislators want to make sure you’re really driving in a realistic way, when you’re testing for maximum pass-by noise levels.
A 1-year monitoring phase starts the 1st of July 2023, after which an evaluation will take place. During the monitoring period, it will not be required yet to be compliant to RD-ASEP. However it is mandatory to provide RD-ASEP results when vehicles are being certified. To which vehicles does RD-ASEP apply? What conditions are to be tested? Who choses those conditions to be tested? How is the expected sound level determined? What are the implications for pass-by noise testers on one hand, and the Technical Service on the other hand that must apply these Real-Driving ASEP tests?
Table of Contents
What is Real-Driving ASEP?
RD-ASEP, or Real-Driving Additional Sound Emission Provisions, is an extension published in Supplement 7 of UN/ECE Regulation 51.03 Annex 9, and can be found here.
It compares for 15 driving conditions within an operational control range the measured sound level against a predicted expected sound level. Real-Driving ASEP compliant are those vehicles that have not more than 2 runs which exceed the expected sound level by no more than 2dB. So at least 13 runs need to be within the expected sound level for that condition.
The operational control range can be described in this table:
| Parameter | Minimum | Maximum |
| Vehicle Speed | >0 km/h at line AA’ | 100 km/h at line BB’ |
| Acceleration | 0 m/s2 | 4 m/s2 |
| Performance | 0 m2/s3 | 35 m2/s3 |
| Gear | ANY for forward driving | |
| Mode | ANY | |
It can be noticed that a new parameter ‘Performance’ is introduced, which is in fact v.a or vehicle speed multiplied with acceleration.
A 1-year monitoring period starts July 1st, 2023. During that year, it is mandatory to perform the RD-ASEP measurements. However, vehicles do not need to comply to the limits. After that year, the collected data will be studied, and based on which the current process, parameters, and limits will be evaluated. Based on that it does not seem likely that Real-Driving ASEP with the requirement to be compliant to the limits will enter into force before the summer of 2025.
To which vehicles does Real-Driving ASEP apply?
RD-ASEP applies to the following:
- M1 and N1 vehicle types: passenger vehicles, and small vehicles for the transportation of goods
- Vehicles with an Internal Combustion Engine (ICE)
- Vehicles fitted with an exterior sound enhancement system
Exempted are vehicles for which the sound enhancement system is solely fitted to be able to comply to the minimum noise standard in ECE R138.
Finally, it is not mandatory to perform RD-ASEP for vehicles:
- with a low power-to-mass ratio (PMR<=60)
- that were certified using indoor facilities
How is the expected sound level determined?
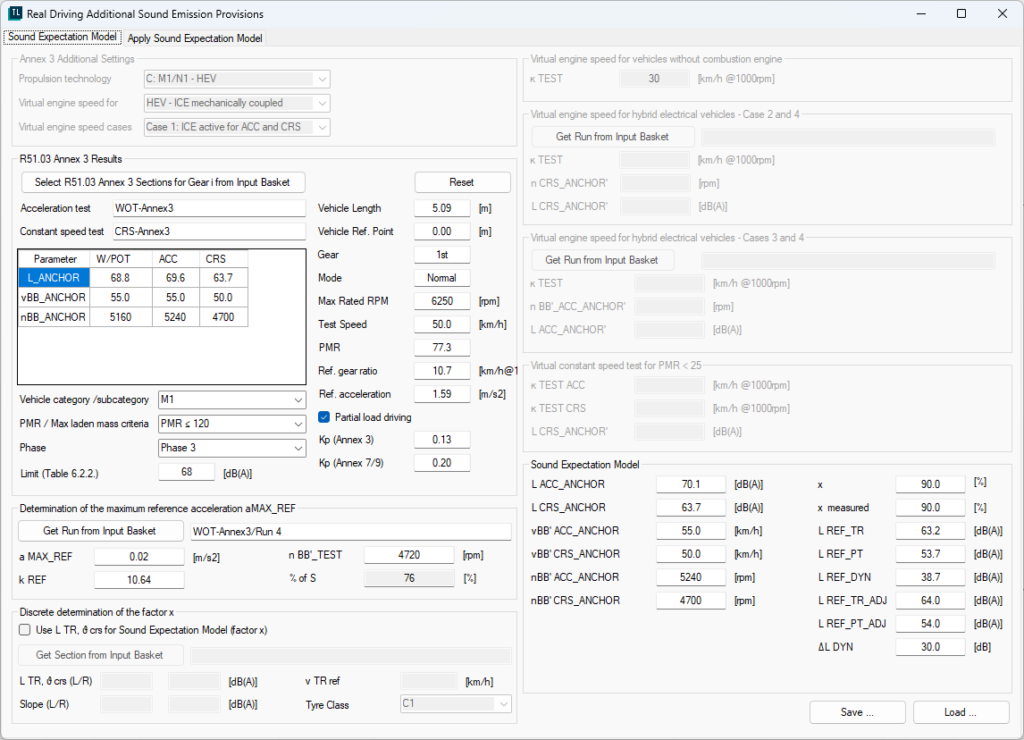
To determine the expected sound level, a Sound Expectation Model is calculated. The model makes a difference for vehicles with different propulsion technologies: (A) ICE, (B) BEV/PHEV, (C) HEV. For these categories, the later parameters of the model are different.
Next, it is also required to indicate whether the propulsion system is mechanically coupled to the vehicle speed or not. Coupled means there is a linear relationship between engine speed and vehicle speed.
Finally, for hybrid powertrains it is also required to select a case describing the activation of the ICE during the Annex 3 measurements: (1) ICE is active in both Acceleration and Constant speed conditions, (2) ICE is only active during acceleration test, (3) ICE is only active during constant speed test, and (4) ICE is neither active during acceleration nor the constant speed test. This considers the anchor testing according to Annex 3. The reason for this is that in the cases where there is no active ICE, a virtual engine speed will have to be determined for the Sound Expectation Model, and an adjustment is calculated for the acceleration and/or the constant speed tests.
The Sound Expectation Model is constructed from Annex 3 measurements for the lowest or only gear to test – the normal pass-by noise results for acceleration and constant speed conditions. The Real-Driving ASEP text refers to that data as ‘anchor’ data and uses also ANCHOR as a subscript in the many formulas and values.
Other input data that may be required, depending on the propulsion type and ICE activity case are:
- the coast-down data used for the tyre rolling sound emission model (Annex 3/Appendix 3). It is used – without the temperature correction – to determine the Sound Expectation Model parameter ‘x’.
- the maximum acceleration performance of the vehicle will be determined with a test run in a low gear under full load condition
- Cases 3/4 (no ICE for the acceleration tests): a test run to calculate a virtual engine speed
- Cases 2/4 (no ICE for the constant speed tests): a test run to calculate a virtual engine speed
Who choses those conditions to be tested?
The Technical Service, the authority that is in charge to homologate vehicles, can choose any condition in the control range. Depending on the vehicle technology, the number of conditions per vehicle is defined as follows:
| D-range | M (locked) | |
| Automatic Transmissions (lockable) | 5 | 10 |
| Automatic Transmissions (non-lockable) | 15 | Not applicable |
| Vehicles with only one gear | 15 | Not applicable |
| Manual Transmissions | Not applicable | 15 |
So, 15 runs will have to be done anyhow. To get within the control range, the Technical Service instructs the driver as follows:
- the gear
- the vehicle mode (e.g., Normal, Eco, Sport, Hybrid, …)
- the entry speed at the AA’ line
- for acceleration runs: the throttle percentage, in steps of 25%
- if required: a pre-acceleration point
The driver will then have to execute the test in these conditions. There is a tolerance of +/-10% on the throttle condition and +/-3 km/h on the entry speed. The test conditions shall be maintained until the rear of vehicle reaches the BB’ + 5m point, at which point the throttle needs to be released. The sound pressure level is observed until the rear of the vehicle passes the BB’ + 20m mark.
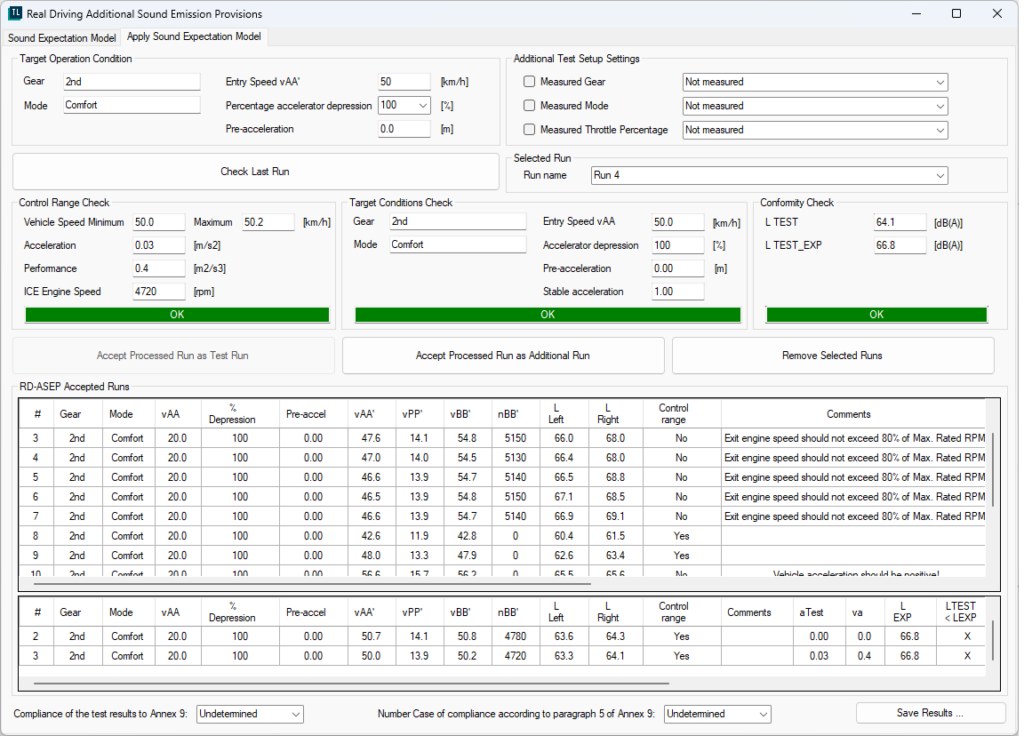
Based on all this, for each of the runs, the Technical Service should:
- check if the measured data was within the control range
- check if the measured run met the target conditions
- check if the sound level of the measured run is below or equal to the expected sound level
In the above screenshot that is indicated by the 3 green bars. The required test condition that the Technical Service defines is entered in the top-left part of the screen.
In general, the Technical Service will start looking for driving conditions that maximize the Performance criterion v.a : lower entry speeds in lower gears will lead to higher accelerations. But higher speeds will not reach high accelerations. Starting for different gears at low speeds in 100% accelerations is a good starting point. Then increase the speeds to see where the Performance maximizes and repeat over different gears.
Complexity for all
Real-Driving ASEP is a very complex method. First, the calculation of the model is complex – there are many rules, formulas, and exceptions to be handled. A profound understanding of pass-by noise testing is required.
Next, from a measurement point of view it is complex as well, as it adds 15 mandatory runs to the measurement scheme. For a certification campaign the following conditions already have to be measured:
- For Annex 3: 4 acceleration runs, 4 constant speed runs. Depending on a single gear or dual gear test, that means 8-16 valid runs.
- For Annex 3, the tyre rolling sound emission model (appendix 2/3) requires at least 6 valid coast-down runs
- For the current ASEP Annex 7: at least 2 or 3 gears per gear have to be measured, with 4 valid runs per gear, meaning 8-12 valid runs.
- Total: 22-34 runs
Adding the Annex 9 RD-ASEP runs means a total of 37-49 valid runs will have to be performed. As in practice it never happens that every measured run is valid, the real number is even higher.
A third axis of complexity is the Technical Service. Contrary to Auto-OEMs and PBN solution providers, they are not part of regulatory organizations like the ISO working group 42 and the UN/ECE GRBP Working Party on Noise and Tyres. Yet they have to give an independent interpretation to the new rules, even if the intend of ISO or GRBP was different.
We’re all in it together
Real-Driving ASEP is a complex extension to the UN/ECE Regulation 51.03 standard. It aims at adding real driving conditions into the homologation procedure. Although Diesel-gate is behind us, there is still the fear that with too little regulation the automotive industry might find loopholes in the legislation.
In the end, it is of anybody’s interest to guide the Technical Service in selecting the 15 test runs in the control range, demonstrate that the runs are within the target conditions, and showing the compliance.
Around the globe there are millions of citizens that are confronted with noise in their daily lives. With RD-ASEP we can justify to them that when it comes to vehicle noise, we are not just complying to a noise test which is less realistic in urban environments. But that we are really driving when we’re testing for Pass-by Noise.
Real-Driving ASEP is available with the release of Simcenter Testlab 2306.
Are you looking for more information about Pass-By Noise Testing and Engineering? Have a look here, or check out some more interesting blogs here, here and here .
Discover the full Simcenter Testlab acoustic product suite here.


