Evaluating Set Screw Effectiveness Through Contact Simulation

Contact problems are among the most nuanced challenges in structural simulation. They sit at the intersection of the geometry, material behavior, boundary conditions, and numerical stability, and even small modeliing decisions can significantly influence the outcome. Set screw assembliies are a good example of this complexity. On the surface, they appear machanically simple, yet their performance depends almost entirely on contact interactions, friction, and load transfer. Accurately predicting when a pin will remain fixed or begin to slide requires a carefully constructed simulation strategy.
Recently one of our Simcenter experts created a 17 minute video explaining how to solve this problem in Siemen’s Simcenter 3D simulation software. Before you commit that much time, in just a few moments, this article walks through a representative set screw model and highlights the key considerations required to evaluate its effectiveness using contact simulation. Rather than focusing on software-specific workflows, the emphasis is on modeling decisions that matter to any simulaiton engineer dealing with friction-driven retention mechanisms.
Building a Representative Mode
The starting point for any contact-driven analysis is a geometry that reflects the physical intent of the assembly without introducing unnecessary numerical complexity. In this case, the model represents a pin retained by set screws acting in orthogonal directions, housed within a retainer. the shaft is intentionally split into two at the junction between contact and no contact to account for sufficient mesh representation in teh contact zone.
Minor geometric simplifications are applied to ensure consistent contact interfaces and avoid artificial interferences. These simplifications are not about reducing fidelity, but about improving robustness. When contact is the dominant physics, clean and well-defined interfaces are often more important than capturing every fillet or chamfer.
Mesh Strategy in Contact Zones
Mesh quality plays a decisive role in contact simulations, particularly when friction and sliding are of interest. In this model, finer mesh densities are applies locally in regions where contact forces are transferred, notably along the pin, the retainer bore, and the faces of the set screws. The goal is to capture contact pressure gradients and relative motion accurately, without over-refining the entire model.
Special attention is paid to the compatibility of meshes across contact interfaces. The surface mesh on the set screws is aligned with that of the pin to improve contact stability and reduce numerical noise. This alignment helps ensure that changes in contact status, such as the transition from sticking to sliding, are driven by physics rather than discretization artifacts.

Defining contact and constraints
The contact formulation itself is intentionally kept consistent across interfaces. Two primary contact pairs are defined: one between the retainer and the pin, and another between the set screws and the pin. Friction is applied uniformly through expressions rather than hard-coded values, allowing adjustmnet and parametric studies.
Constraints are introduced only where necessary to eliminate rigid body motion and guide the system toward the intended load paths. Fixed roller constraints and cylindrical constraints are used to stabilize the model while preserving axial and tangential degrees of freedom that are essential for observing sliding behavior. This balance between stability and freedom is critical; overly restrictive constraints can mask real physical responses, while insufficient constraints can lead to non-convergence.
Applying loads and managing solution steps
The load application is handled with particular care, as contact problems are highly sensitive to how forces and displacements are introduced. To achieve this, we used a spring at the end of the shaft to pass the load to the shaft. Rather than enforcing the displacement directly on the shaft, the spring is directly loaded, then the spring pulls on the shaft. It was believed that applying the load directly to the shaft could cause it to immediately initiate sliding, or at least slide prematurely.
The solution is divided into two distinct steps. In the first step, set screw loads are applied incrementally to allow contact to form smoothly. In the second step, the enforced displacement is increased with finer increments to capture the onset of sliding. This staged approach improves convergence and makes it easier to isolate the conditions under which frictional resistance is overcome.

Interpreting contact behavior
Post-processing focuses on understanding how contact evolves rather than simply extraction reaction forces. Contact status indicators reveal whether interfaces are open, sticking, or sliding, providing immediate insight into system behavior. Scaled contact spheres are used to visualize the development and redistribution of contact forces as loading progresses.
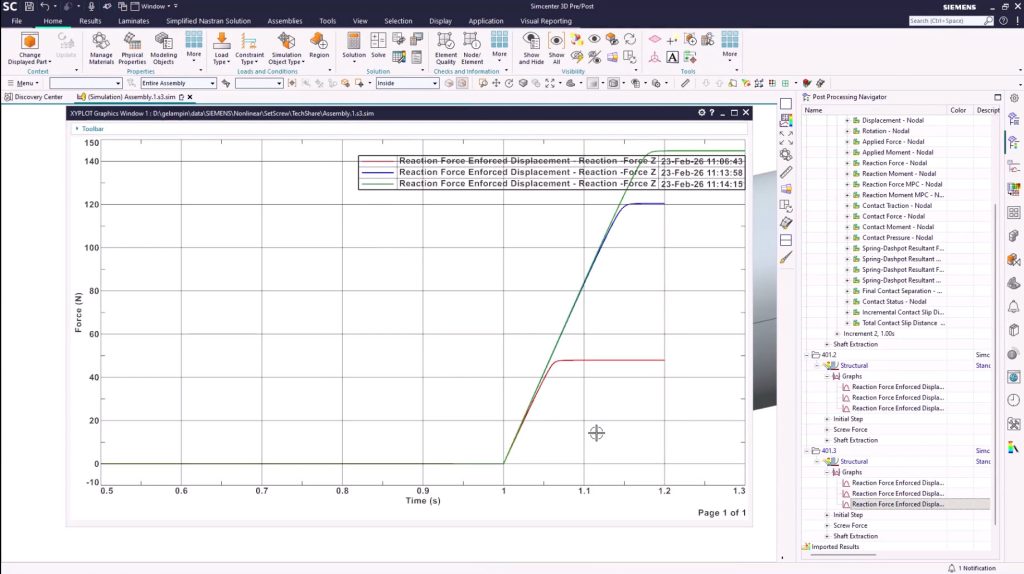
To explore sensitivity, multiple solutions are run with different load scaling factors applied to the screws. The resulting force–displacement curves make it possible to identify sliding thresholds and assess how variations in preload influence retention performance. These comparisons are particularly valuable when evaluating design margins or exploring alternative tightening strategies.
Closing thoughts
Simulating set screw effectiveness is less about applying a single “correct” setup and more about understanding how modeling choices influence contact behavior. From geometry preparation and mesh refinement to load sequencing and result interpretation, each decision contributes to the credibility of the outcome.
When approached methodically, contact simulation becomes a powerful tool for uncovering the mechanics behind friction-driven retention. For simulaiton engineers, mastering these details not only improves model robustness but also builds confidence in predictions that directly inform design decisions.
If you liked this content, see the previous blog that these two authors worked on together: The rocket that refused to behave – The ultimate guide to spider element automation for rocket and aerospace structures


