The best of what’s new in Simcenter Prescan 2407

Scalable Hardware-in-Loop for Physics-Based Camera
With our previous release of Simcenter Prescan, we introduced a revolutionary method to tackle the scalability and performance problem of Hardware-in-the-loop (HiL) setups. By providing engineers with an interface to access the sensor data produced by simulation, as soon as the data are generated on the GPU, and simultaneously performing a GPU data transfer to the device under test. This is orders of magnitude faster than conventional CPU based data transfer. With Simcenter Prescan 2407, we made this functionality available for the Physics Based Camera.
Next to solving the sensor data transfer scalability problem, we are also creating a hardware-agnostic modular HiL framework that allows for the receiving of the control signal from the device under test and feeding it to a real-time platform running vehicle dynamics. This release marks the introduction of this framework with a demonstrator that can be run by users. Unlike the previous HiL setups where a Simcenter Prescan installation on the real-time hardware system was required, this demo will not require this installation. It will deploy Simcenter Prescan on a powerful simulation PC while only running the vehicle dynamics on a real-time system.
Navigation on Autopilot, Lane marker sensor, and road topology with Simcenter Prescan
This release focuses on further enabling users to handle navigation on autopilot use cases with Simcenter Prescan. One of the important challenges with navigation on autopilot system design and testing using simulation is to get accurate road and lane information from the simulator. In this release, we addressed this problem by extending our lane marker sensor to provide additional outputs that are required to enable navigation on autopilot use cases.
Enhanced Radar and Camera simulation with advanced surface modeling and realistic 3D assets with Simcenter Prescan
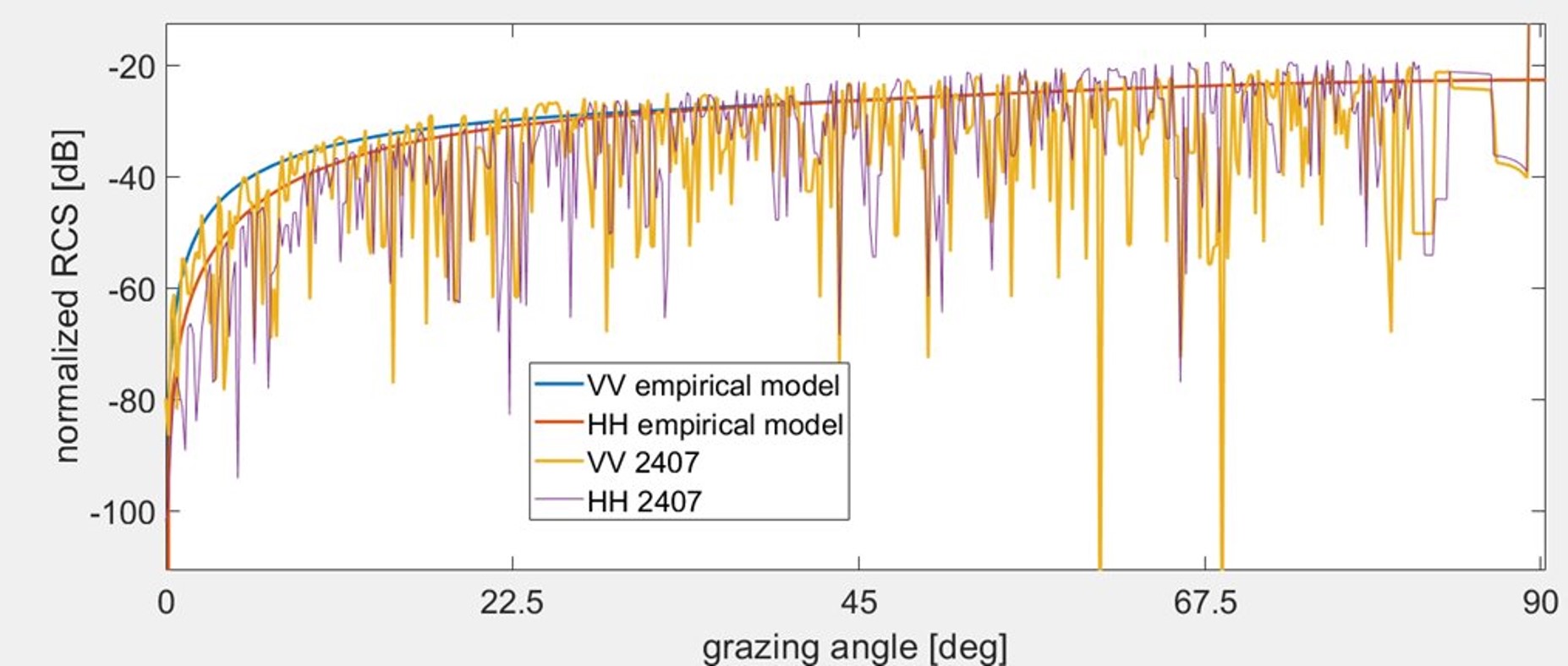
Modeling rough surfaces for radar simulation is complex because radar waves interact with these surfaces differently compared to point targets. Rough surfaces scatter radar waves in multiple directions. Our Physics-based Radar accurately captures this nuanced material behavior, ensuring that the power return of specular reflections matches measurements and non-specular reflections align well with existing data.
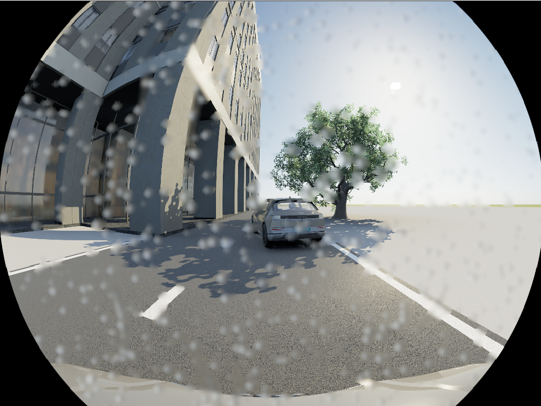
Similarly, raindrops on camera lenses can significantly affect image quality and accuracy. By modeling how raindrops impact camera images, we can develop better image processing algorithms to mitigate these weather effects. In this release, we’ve enhanced the fisheye camera model to realistically simulate raindrop movements over the lens, accounting for shape and image mask.
Additionally, we’ve expanded our library of ready-to-use 3D assets, including a 53-foot trailer model and additional human models.
What’s Next?
In a world rapidly progressing toward Level 4 autonomous vehicles, Siemens Digital Industries stands at the forefront, bridging the gap between virtual and real-world testing. Simcenter Prescan, as part of the Simcenter Autonomy portfolio offers a seamless solution to transform drive data into scenario snippets ready for closed-loop testing and safety validation. We are currently working on a ground-breaking solution to discover and concretize the most hazardous and challenging scenarios. Our upcoming critical scenario creation offering will empower you to proactively prepare your systems to navigate these situations safely on the road. We invite you to stay tuned and join us on this exciting journey of innovation.
For more updates and insights, follow us on our website and social media channels. Together, we are shaping the future of ADAS and autonomous driving.
Want more information?