Extending Simcenter Prescan’s sensor quality for real-world scenarios simulation

The value of AI and machine learning towards autonomy and efficiency is being gradually accepted in the domain of autonomous driving, as in other fields. However, we have seen how a single fatal accident of a robo-taxi with a pedestrian [1], at night, can completely shatter public confidence and acceptance and stir a debate on the safety and reliability of the underlying technology. What can Autonomous Vehicle development companies do to make sure the vehicles are safe on the road under all possible conditions? They need to be confident that their systems can first “See” precisely and then “Act” appropriately to real-world challenges.
Simcenter Prescan 2311 empowers users to bring their simulations closer to real-world conditions by enhancing the quality and performance of our sensor simulation suite. We understand that realism and accuracy are paramount in the world of ADAS and autonomous driving. Our focus on improving existing sensor capabilities ensures that your simulations are more reliable and precise than ever before, thus enabling the autonomous driving systems to “See” precisely.
Camera-based system validation in the presence of blooming
Camera-based systems face unique challenges, especially in high-intensity illumination scenarios. “Blooming”, where pixels lose their capacity to accommodate additional charge, can lead to erroneous values or missed detections. Simcenter Prescan’s Physics-based camera now includes a standard blooming option, creating more photo-realistic simulation results. This enhancement facilitates comprehensive testing and validation of computer vision algorithms under various lighting conditions.
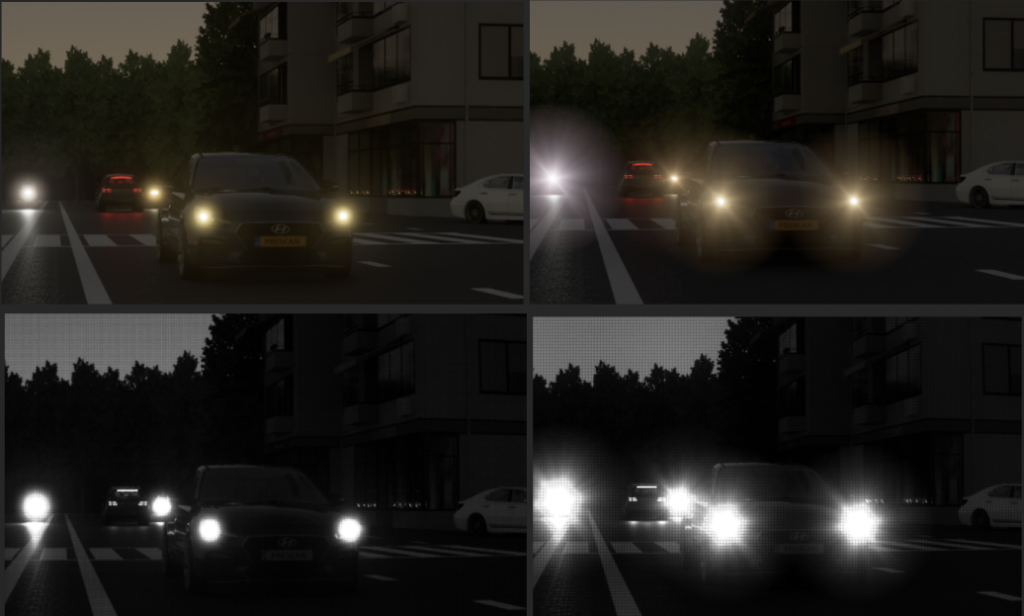
Fig 1: Simcenter Prescan’s Physics-Based camera RGB (top) and Bayer image (bottom) outputs, showcasing standard blooming (bottom left) and convolution blooming (bottom right).
Testing autonomous vehicle algorithms against adverse lighting conditions
Adverse lighting conditions pose a real challenge for camera-based perception algorithms. Numerous reports of autobraking systems being confused by non-threats such as shadows highlight the importance of testing against such lighting conditions [2]. With the transition to Unreal Engine 5, Simcenter Prescan’s physics-based camera has been enhanced with a new indirect illumination lighting option, utilizing Unreal’s state-of-the-art fully dynamic global illumination system, Lumen. This addition provides users with an even more photo-realistic lighting environment, ensuring more accurate and reliable simulations.

Fig 2: Simcenter Prescan’s Physics-Based camera indirect illumination lighting option is able to accurately resolve reflected light.
Custom Dynamics in FMU format
Simcenter Prescan 2311 users can now incorporate their own Functional Mock-up Interface (FMU) for vehicle dynamics, providing unparalleled flexibility in simulation for the verification of autonomous systems. This feature enables our customers from multiple domains including automotive, trucks, heavy machinery, and factory, to model the complete digital twin of their systems, making Simcenter Prescan a powerful tool for verifying and validating autonomy algorithms, and thus enabling the autonomous driving systems to “react” appropriately to adverse driving scenarios.
What’s Next?
In a world rapidly progressing toward Level 4 autonomous vehicles, Siemens Digital Industries stands at the forefront, bridging the gap between virtual and real-world testing. Our commitment to advancing ADAS and autonomous driving extends beyond software releases. We are currently working on a ground-breaking solution to discover and concretize the most hazardous and challenging scenarios. Our upcoming critical scenario creation offering will empower you to proactively prepare your systems to navigate these situations safely on the road.
We invite you to stay tuned and join us on this exciting journey of innovation.
Unknown-Unsafe Scenario Creation
For more updates and insights, follow us on our website and social media channels. Together, we are shaping the future of ADAS and autonomous driving.
Want more information?
[2] https://eu.usatoday.com/story/money/cars/2022/02/24/honda-probe-unexpected-braking/6921949001/


