Don’t forget to record your GPS data, here is why

The Mont Ventoux is a mountain in southern France. It is famous for its frequent inclusion in the Tour de France cycling race. It is 1910 m high, and the road to climb it is 25 km long with a relatively constant slope of 7.5%.
Why are we talking about this in a Simcenter blog? Well, because we actually drove there to validate a new feature of Simcenter Amesim 2021.2, the GPS data import.

Why importing GPS data acquisitions?
Since the “Dieselgate” in 2015, automotive regulations have evolved to be applicable to realistic driving scenarios. This has been enforced through the change of driving cycle from the NEDC (New European Driving Cycle) to the WLTP (Worldwide Harmonised Light Vehicle Test Procedure) and through the implementation of the RDE (Real Driving Emission) test, at least in Europe.
Automakers now give particular attention to the robustness of their fleet’s pollutant emission regulation solutions and fuel consumption measurements. This translates to the fact that they test (physically and virtually) their vehicles over a wide set of realistic mission profiles, representing real drivers’ behaviors.
To seamlessly switch from the physical (prototype) to the virtual world (simulation), engineers need to apply the same boundary conditions (velocity, slope, altitude, ambient temperature …) to their tests and simulations. This is where the Simcenter Amesim GPS data import App comes in handy. It processes and generates these input files automatically from a .GPX file and automatically applies them to a Simcenter Amesim vehicle model.
Physically going to Mont Ventoux
The primary requirement for Simcenter Amesim developers is Quality. Hence, to make sure that we properly implemented the GPS data import feature, our developer took his own car and actually drove to Mont Ventoux and recorded the GPS trace.
They chose a stunning Lexus CT200h, featuring the famous Hybrid Synergy Drive powertrain from Toyota Motor Corporation.

The trip started from Lyon. It took 2h38 minutes to reach Mont Ventoux and we performed a GPS recording.
For reference purposes, we logged the fuel consumption data given by the Lexus control unit.

Virtually going to Mont Ventoux with Simcenter Amesim
Once our GPS data is recorded, we need to generate the mission profile that will be used in the Simcenter Amesim simulations. And this is where the GPS data import application comes into play.
The app’ opens from the Simcenter Amesim App space and looks like this.
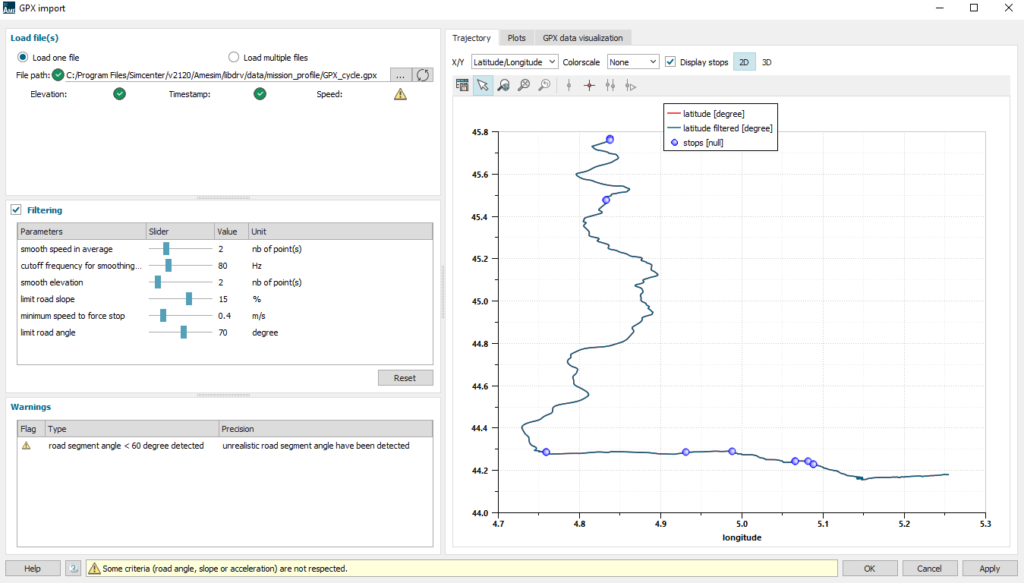
The app’ reads the GPX file selected and displays its trajectory through latitude and longitude coordinates. Since the GPX file contains position, speed and altitude, we can visualize these values too. It is important to be able to filter the raw values because GPS recordings are not always clean. They can sometimes lose GPS signal, variable sampling frequency and GPS inaccuracies. This is exactly what the App’ does automatically so that Simcenter Amesim can directly read the generated files.
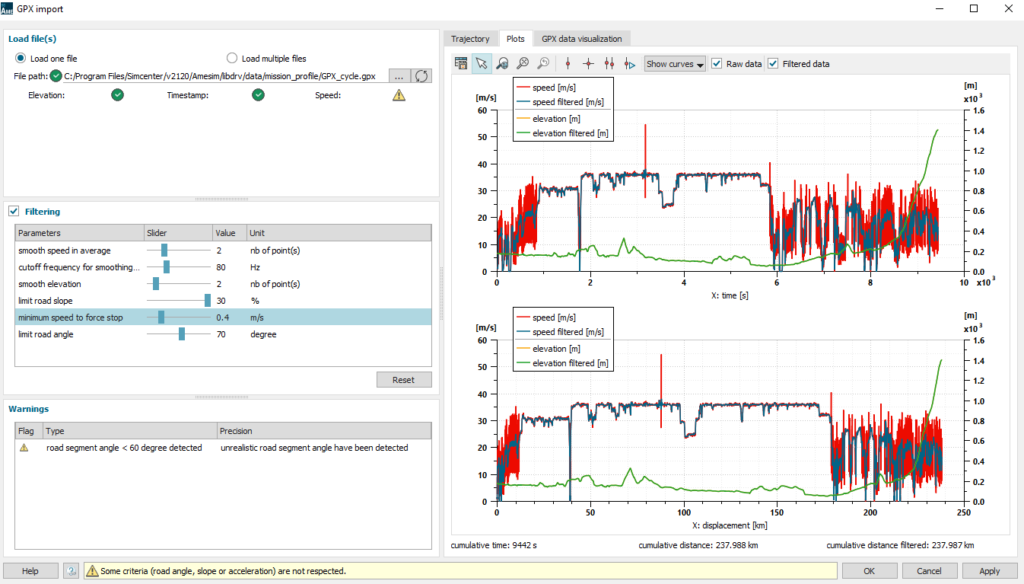
After that, we generate the data files and can use them in the Simcenter Amesim model.
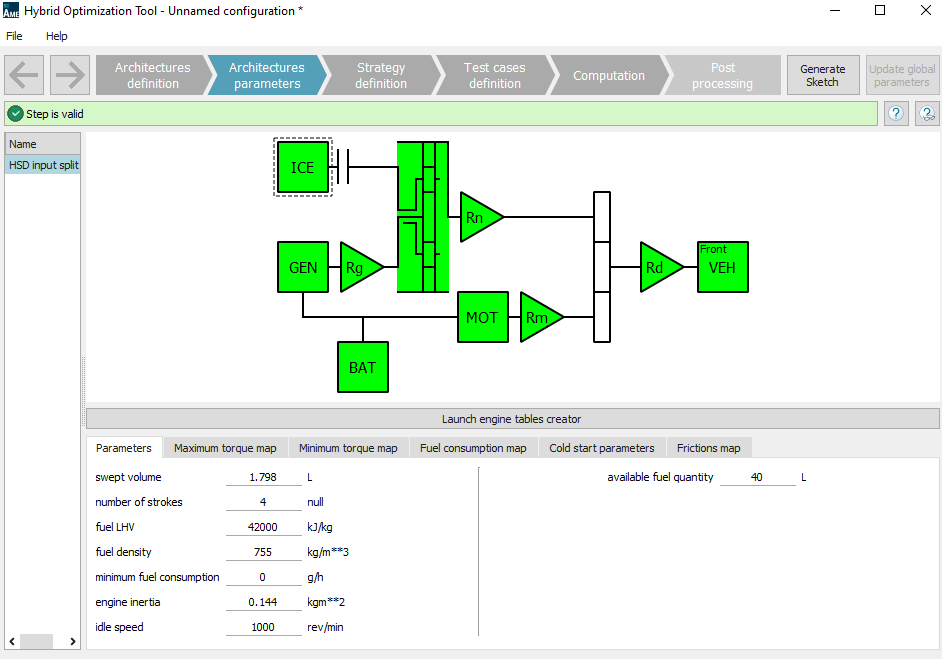
Once we got the boundary conditions ready for our simulations, we built the corresponding Simcenter Amesim model for the Lexus CT200h. To do so, we used the HOT (Hybrid Optimization Tool) application and parameterized it to match the Hybrid Synergy Drive powertrain and Lexus CT200h vehicle.
In the “Test cases definition” step, we load the generated speed and altitude files and we can launch the computation and post-process the results.
What have we learnt?
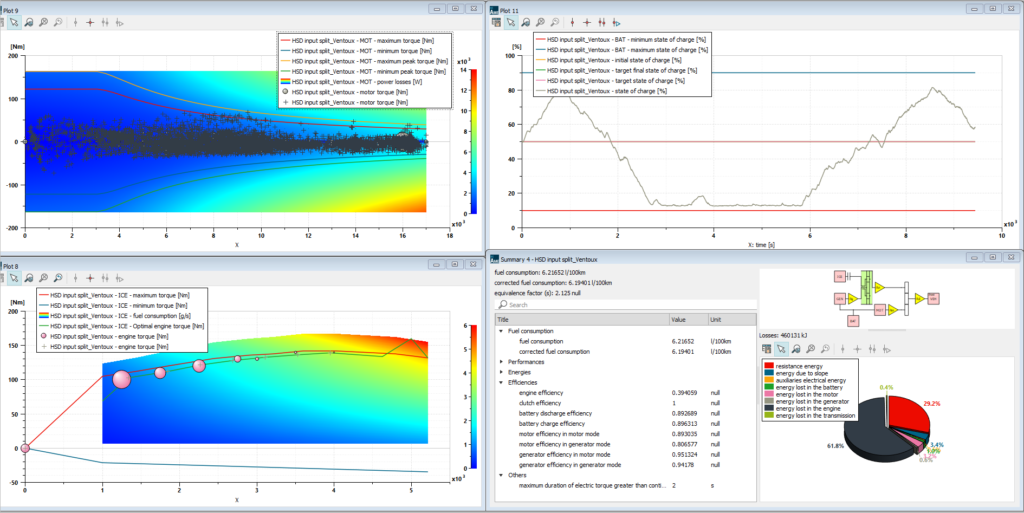
Looking at the results, the average fuel consumption for such a trip is 6.2 l/100km. This is really close to the actual fuel consumption we observed with the real car (5.9 l/100km). Nevertheless, the comparison must be considered carefully. The displayed fuel consumption is reportedly slightly underestimated compared to the actual car fuel consumption.
The final step of this process is to generate the model (automatically) and continue parameter studies or design optimization within Simcenter Amesim. The model can be trusted, has the proper boundary conditions and has a robust controller (ECMS -Energy Consumption Minimization Strategy).
In conclusion, in just a few clicks, we were able to import raw GPS data, filter them, export them into the Hybrid Optimization Tool and verify that the model gives consistent results from the energy balance point of view. This allowed us to get our simulations closer to real-world and future-proof with respect to CO2 emission regulations.
To give it a try, download the newly released Simcenter Amesim 2021.2 version. Alternatively, contact us to get a free trial.


