システム・シミュレーションを使用した燃料電池電気自動車のエネルギー性能の評価
燃料電池電気自動車のマルチドメイン・システム・シミュレーション・モデルを使用して、車両のパワートレイン、燃料電池、補助装置、およびコントローラーの間の相互作用を予測することができます。
目的
ゼロエミッション車のトレンドを受けて、OEMは、特に再充電を繰り返すことなく長距離走行が必要な車両に対して、燃料電池をバッテリーの有効な補完物として検討しています。
しかし、燃料電池スタックとそれ以外のすべてのコンポーネントを車両に統合することは容易ではありません。相互作用し合う多くの物理特性やサブシステムを、最適な制御方式とともに慎重に組み合わせなければならないからです。必要な性能レベルを実現するには、確かな信頼性と寿命を確保しながら、エネルギー消費を最小限に抑えなければなりません。
このような理由から、マルチフィジックス・システムのシミュレーションベースのアプローチを用いることで、空気供給システムや水素供給システム、および水管理システムや熱管理システムに統合された燃料電池の挙動を予測し、理解できるようになります。
Simcenter Amesim 2022.1では、すぐに使用できる新しいテンプレート・モデルを開発しています。トヨタMIRAIやHyundai Nexoなど、最近の燃料電池電気自動車の標準的なコンポーネントとサブシステムがここに含まれます。
このモデルには、次のサブシステムが含まれています。
- 車両環境と電気モーター
- 電気ネットワークとバッテリー
- 燃料電池スタック
- 空気供給システムとカソード側での制御
- 水素再循環ループとアノード側での制御
- スタック冷却システム
このモデルでは、システム・シミュレーションを使用して、燃料電池電気自動車のエネルギー性能 (車両の航続距離、車両のエネルギー性能、現実的な走行サイクルの水素消費量) を評価できます。
説明
略図の左側では、ポートのないコンポーネントを使用して、以下を定義しています。
- 混合物中のガス種、ガス特性
- 液体水の特性と水相変化条件
- スタックの固体部分の熱特性
- 冷却システムのモデルデータ (冷却液の特性と周囲条件)
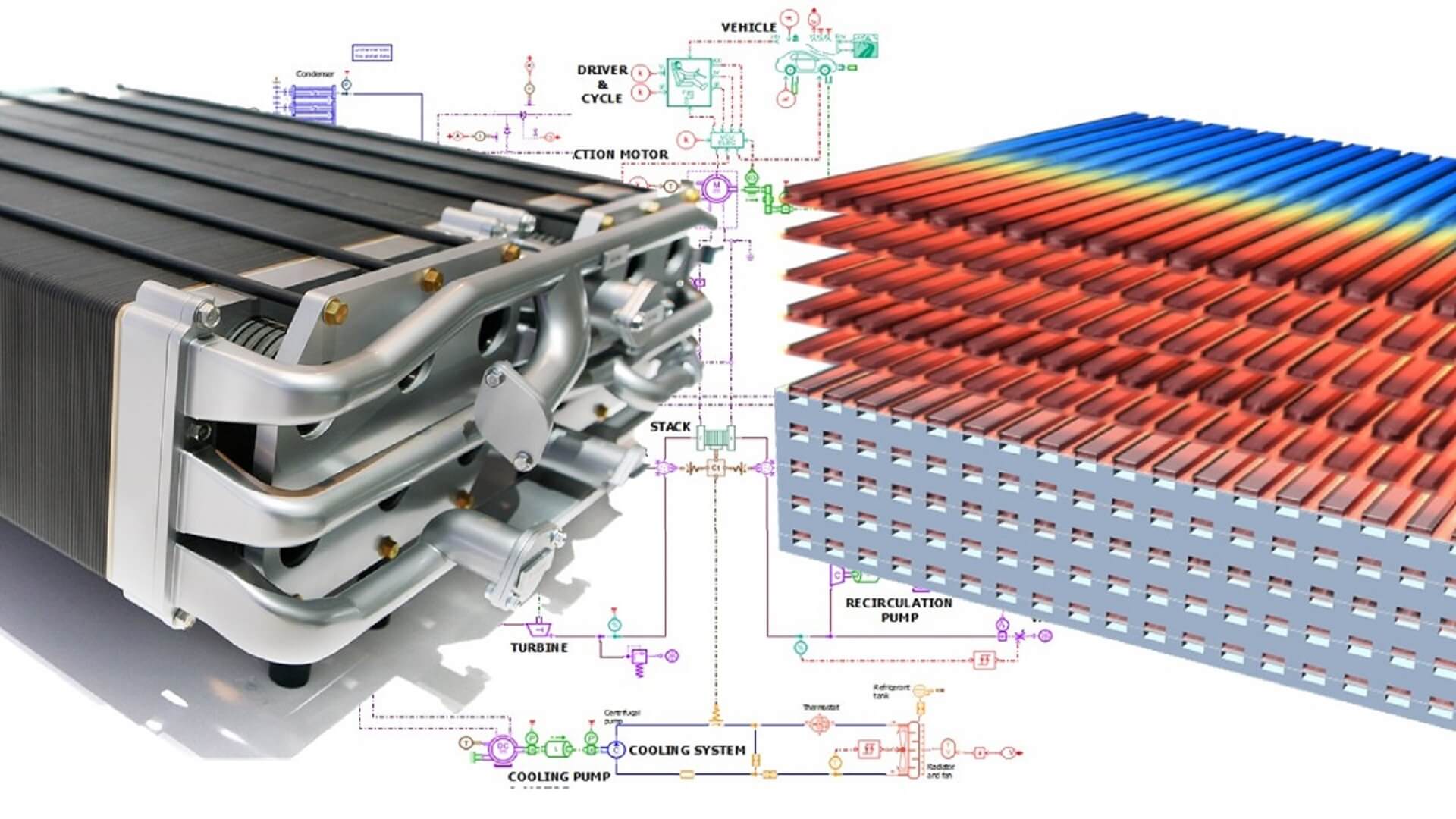
略図の右側は、燃料電池電気自動車のモデルを示しています。これは、以下の6つの異なるサブシステムで構成されています。
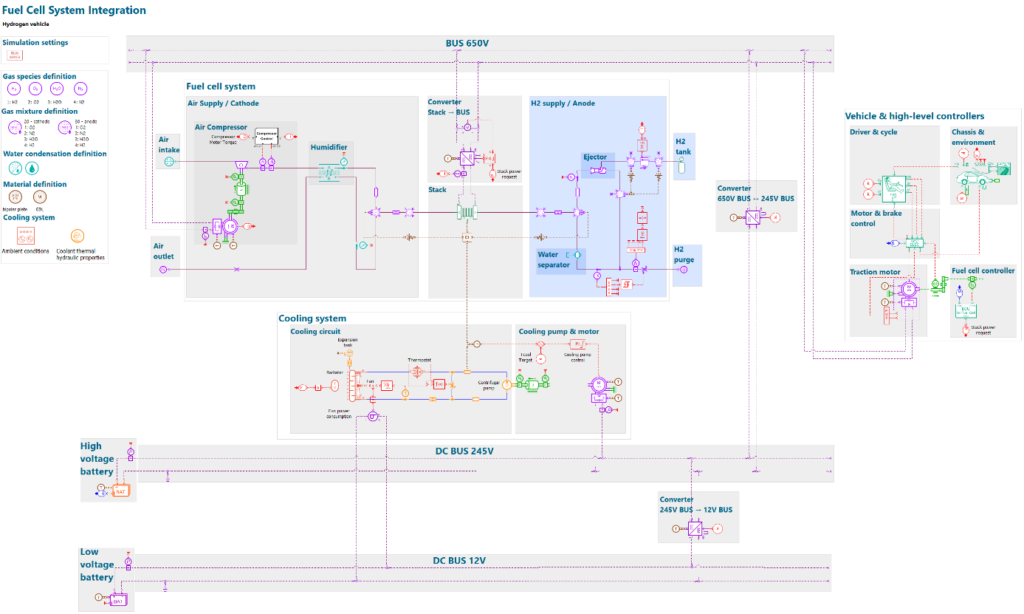
- 車両と高レベルコントローラー:
- ドライバーとサイクル: ドライバー・コンポーネントは、シナリオを実現するために、ドライバーの加速とブレーキ・コマンドの予測に使用されます。勾配の有無にかかわらず、ドライバー・コンポーネントのパラメーター・ウィンドウでさまざまな走行サイクルを定義できます。このデモでは、WLTCサイクルを選択しており、実際の条件に即した速度ダイナミクスを備えた都市、郊外、高速道路での走行が含まれます。
- モーターとブレーキ・コントローラー: 加速を確保するために、要求されたモータートルクを計算します。また、車両が走行サイクルに追従するために必要なブレーキ・コマンドを提供します。
- シャーシと環境: 車両コンポーネントは、シナリオ全体で動作中の車の加速度と速度を評価するために使用されます。この速度は、主に電気機械のトルク、車両に加えられる抵抗力、および車両の重量に依存します。
- トラクション・モーター: モーターモデルは、要求されたトルクを車両制御ユニット (VCU) で計算し、パワートレインに伝えます。電気モーターと車輪の間には伝達比が適用されます。
- 燃料電池コントローラー: 車両の電力需要と燃料電池コントローラーで設定された充電状態のしきい値に基づいて、燃料電池スタックまたはバッテリーのどちらがシステムにエネルギーを供給するかを決定します。
- 電気回路:
- HVバッテリーから冷却液ポンプに電力を供給する245Vの高電圧バス
- 燃料電池スタック、空気圧縮機、トラクション・モーターが接続されている650Vパワーブースト・バス。DC/DCコンバーターは、これら2つのバスを一つにつなげます。
- LVバッテリーからラジエーター・ファンに電力を供給する12Vの低電圧バス。
モデルでは、トラクション・モーターの回生制動が考慮されていることに注意してください。スタック/バッテリー制御方式は、燃料電池コントローラーで変更できます。また、StateChart機能を使用して独自の制御モデルを開発したり、別のシミュレーション環境で開発された制御モデルと接続することもできます。
- 燃料電池スタック: カソードとアノードの電流、温度、動作条件を考慮してスタック電圧を評価します。2つの拡散コンポーネントを持つ電気化学サブモデルは、スタック電圧が電極の反応種条件に依存できるように設定されています。また、化学反応による生成物と反応物のモル流量を予測し、膜を横切る水の移動をモデリングします。スタックの動的熱挙動は、膜プレートとバイポーラー・プレートの両方に対する単一の熱容量を考慮して予測されます。これは、燃料電池スタックから発生する熱と冷却液ループから除去される熱とのバランスに起因します。トラクション・モーターの電力要求によって、高電圧電気回路に接続されたDC/DCコンバーターを介して燃料電池スタックが動作します。
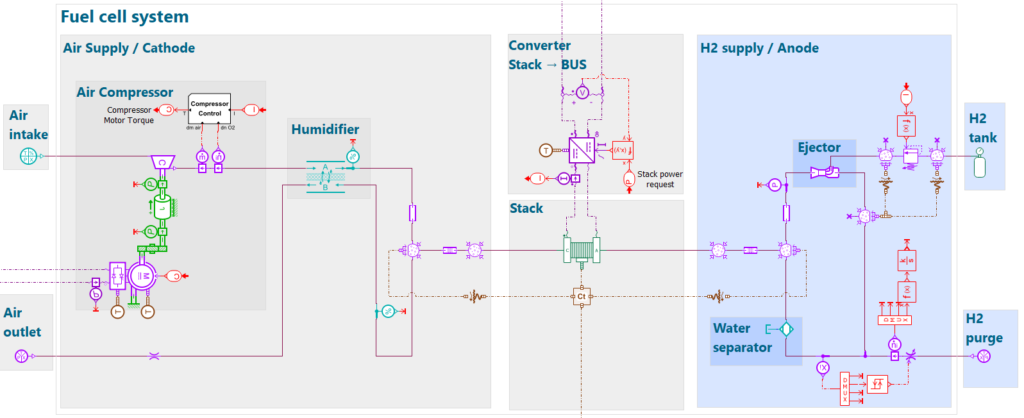
- 給気システム
- 圧縮機コントローラー: コンプレッサーに動力を供給する電気モーターに必要なトルクを計算して、O2化学量論の目標を確保します。
- 空気圧縮機: 化学量論の目標を確保するために、スタックのコンポーネントに必要な空気質量流量を供給します。動力は、要求された質量流量の確保に必要な回転速度を提供する電気モーターによって供給されます。
- 膜加湿器: スタックの出口から排出される湿った空気で、乾燥した流入空気を加湿するために使用されます。
- スタックのカソード側: 拡散コンポーネントで区切られた2つのガス混合チャンバーによってモデリングされています。チャネル内とカソードでの混合ガス組成をそれぞれモデリングします。拡散コンポーネントは、ガス拡散層 (GDL) 全体の拡散をモデリングします。
- 水素再循環ループ
- タンク: 高圧タンクによって、水素がアノードループに供給されます。中間圧力調整器が圧力を下げます。エジェクターは最終的に必要なH2モル流量を提供します。
- スタックのアノード側: 拡散コンポーネントで区切られた2つのガス混合チャンバーによってモデリングされています。それぞれ、チャネル内とアノードでの混合ガス組成をモデリングします。拡散コンポーネントは、ガス拡散層 (GDL) 全体の拡散をモデリングします。
- ウォーター・セパレーター: 機能モデルを使用して、アノード側の混合物から液体水を除去します。
- パージバルブ: 窒素のモル分率が目標値よりも高くなると、このバルブが開きます。一部の水素反応物を浪費しますが、スタック性能を低下させるH2希釈を回避します。
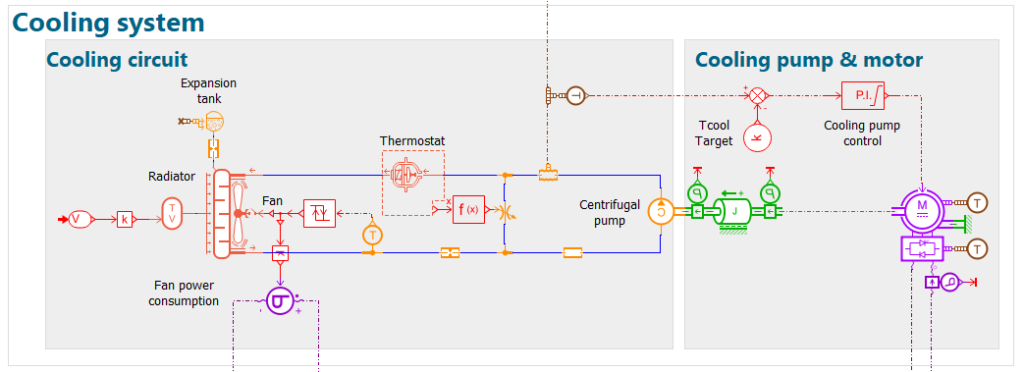
- 冷却システム: 冷却システムは、スタック温度の調整に使用されます。ポンプは、冷却ループ内の冷却液 (水とグリコールの混合物) の流れを生成するために使用されます。冷却液の温度が指定のしきい値を超えると、サーモスタットが開き始め、冷却液がラジエーター・ブランチに放出されます。追加の冷却電力が必要な場合、2番目のしきい値によってファンが作動します。
車両とパワートレインの性能
この完全なモデルにより、システム・シミュレーションを使用して燃料電池電気自動車のエネルギー性能を評価できます。
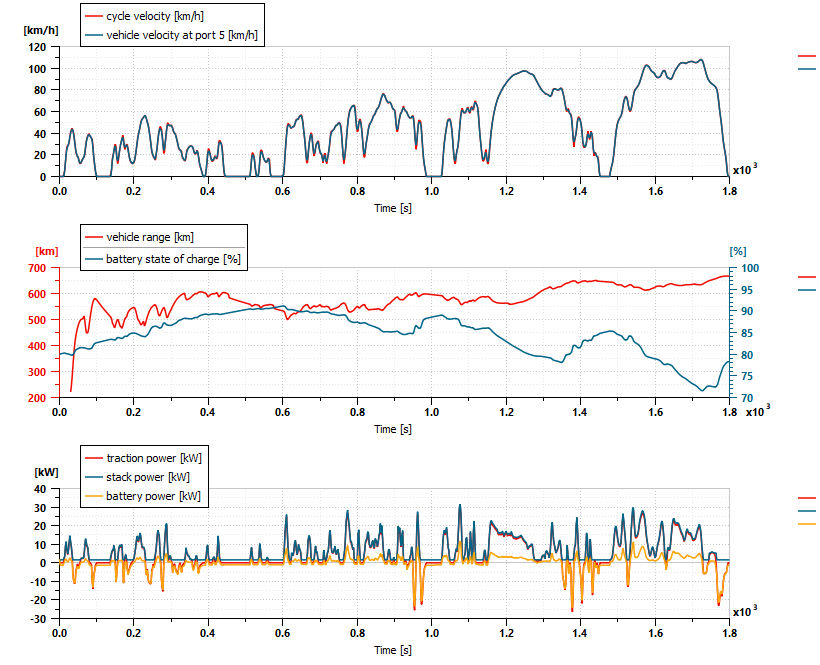
1番目 のグラフ は、走行サイクル速度の要求と、車両モデルで計算された車両速度を示しています。2つの曲線はほぼ完璧に一致していることから、車両が走行サイクルどおりに走行していることが分かります。
2番目のグラフは、車両の航続距離とバッテリーの充電状態 (SOC) を示しています。バッテリーのSOCは、初期段階とまったく同じではありません。そのため、サイクル中のバッテリーのエネルギー変動を考慮すると、車両の航続距離はわずかに異なる場合があります。
3番目 のグラフ は、要求された電力を回路全体に供給する、燃料電池スタックとバッテリーの間の制御方式を示しています。スタックは、必要な電力をトラクション・モーター、バッテリー、補助装置に供給します。バッテリーは、トラクション・モーターが電力を要求しないときにスタックによって充電され、回生制動中に電力を回復します。
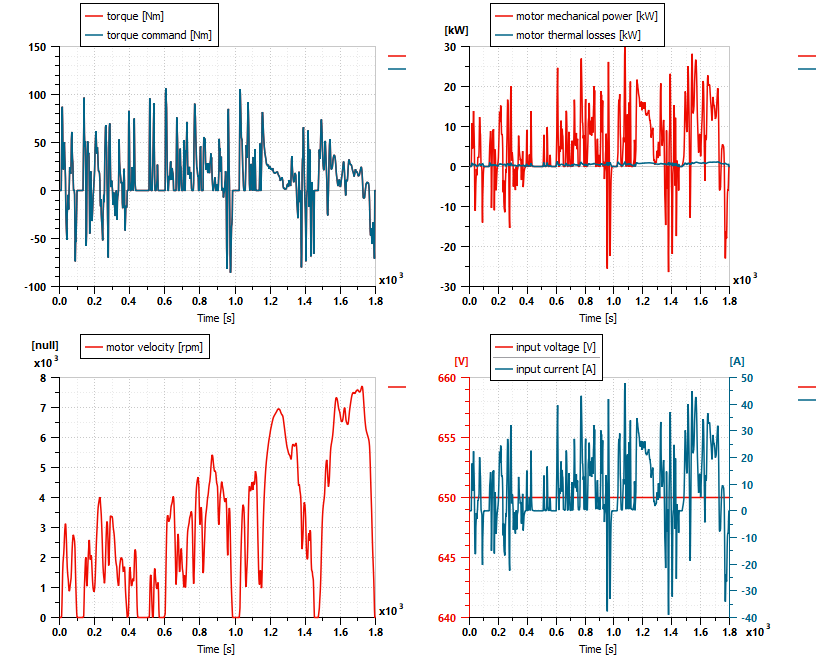
左上 隅のグラフは、モーター・コントローラーからのトルク要求と比較したトラクション・モーターのトルクを示しています。
右上 隅のグラフは、走行サイクルに沿って車を動かすために使用されるモーターの機械力と、対応するモーター損失を示しています。
左下 隅のグラフは、トラクション・モーターの速度を示しています。
右下 隅のグラフは、トラクション・モーターの電圧と電流を示しています。
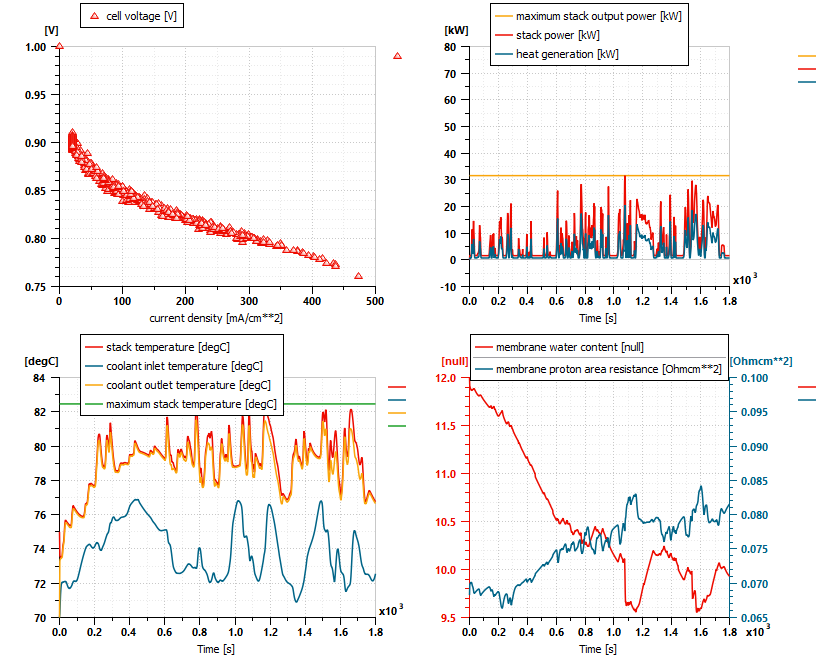
スタック性能
左上隅のグラフは、電流密度とスタック電圧の動作点の関係を示しています。これは、低/中電流密度およびさまざまな動作条件下での燃料電池スタックの分極曲線の概要です。
右上隅のグラフは、スタック電力および反応による熱損失を示しています。走行サイクル中に供給される最大スタック電力もプロットされています。
左下隅のグラフは、冷却ループ内のスタックと冷却液の温度を示しています。冷却液の温度がスタック温度よりも低くなっています。これは、略図で設定されたスタックと冷却システム間の非理想的な熱交換によるものです。
右下のグラフは、膜の含水量と膜のプロトン比抵抗を示しています。膜の含水量が低いほど膜抵抗が高くなるため、抵抗電圧降下が大きくなります。
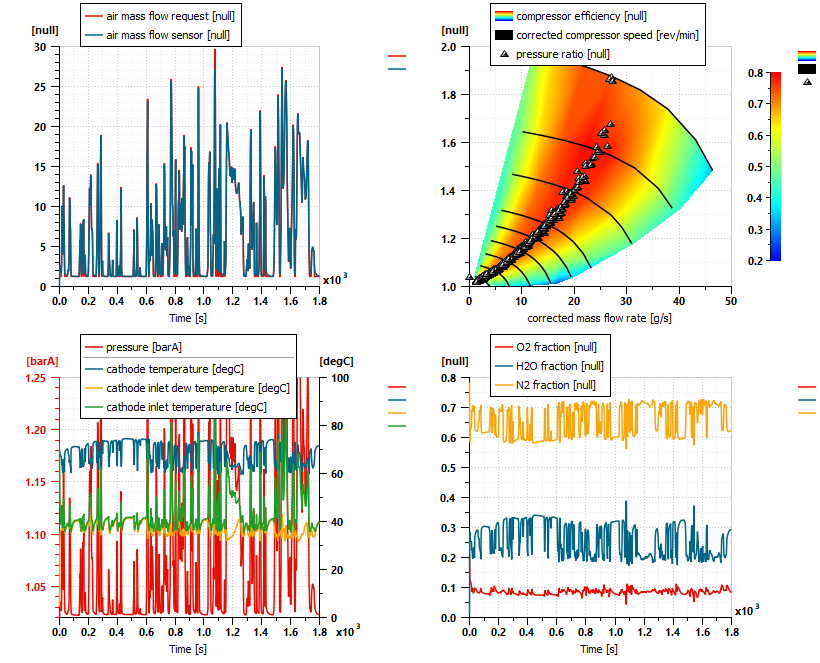
カソード側について
左上 隅のグラフは、スタックに入る空気質量流量を、空気質量流量コントローラーから要求された空気質量流量と比較しています。
右上隅のグラフは、補正された質量流量に対する圧縮機の圧力比を示しています。曲線は、圧縮機の効率の色付きマップと圧縮機の補正速度等値線に重ねて表示されています。回路特性と圧縮機の効率が線に追従するほど、圧縮機の効率は高くなります。そのため、出口温度の上昇は低くなります。
左下 隅のグラフは、カソードの圧力、温度、入口温度、および入口露温度を示しています。露温度は、水が液相になり始める温度であるため、露温度よりも高いスタック温度を一貫して確認できます。
右下 隅のグラフは、カソードでの各種のモル分率を示しています。O2 モル分率は、化学反応によりスタック入口O2 モル分率よりも低くなります。
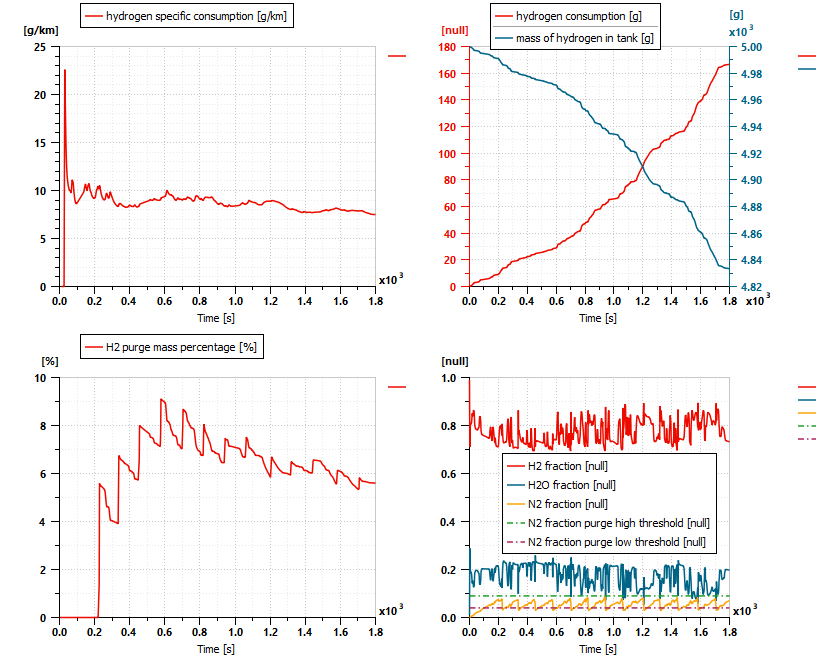
アノード側について
左上 隅のグラフは、走行サイクルに沿ったkmあたりのH2 消費量を示しています。
右上隅のグラフは、走行サイクル中のタンク内のH2消費量 (g) とH2の質量を示しています。予想通り、H2の消費量は、タンクから出たH2と同じです。
左下 隅のグラフは、走行サイクルを考慮したパージによって失われたH2 の割合を示しています。
右下 隅のグラフは、アノードでの各種のモル分率を示しています。N2 モル分率は、パージ開始条件とパージ停止条件に対応する高しきい値と低しきい値の間で振れています。
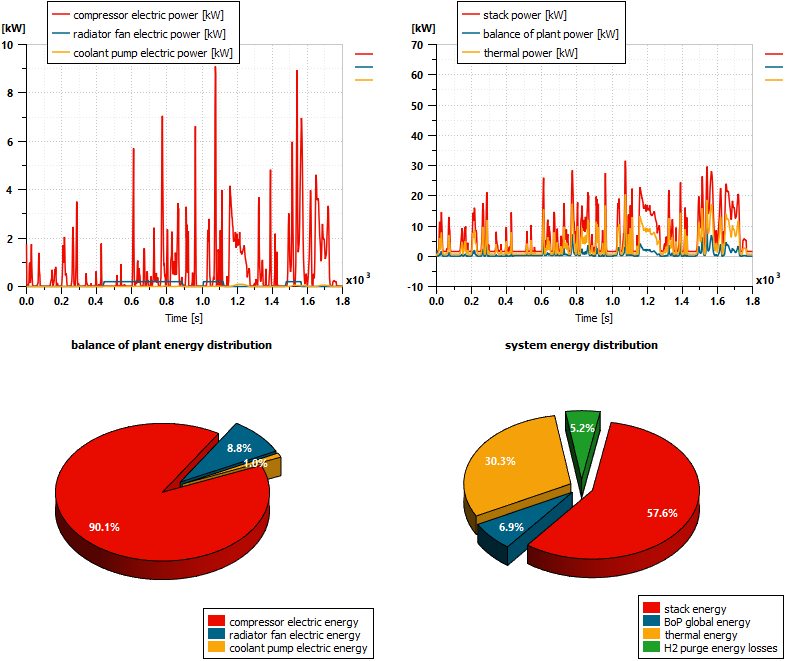
電気消費量
左上 隅のグラフは、走行サイクルで補助装置が消費する電力を示しています。
右上隅 のグラフは、走行サイクルでのシステム全体の電力分布を示しています。
左下 隅のグラフは、補助装置が消費するエネルギーの分布を示しています。圧縮機が主に電気を消費しています。
右下のグラフは、システム全体のエネルギー分布を示しています。エネルギーの58%はスタックによって電力に変換されています。他のエネルギーは熱に変換されるか、補助装置が使用しています。
まとめ
ここでは、システム・シミュレーションを使用して燃料電池電気自動車のエネルギー性能を評価し、燃料電池電気自動車に統合された燃料電池システムの物理的挙動をシミュレーションする方法を示しました。 設計の選択肢を仮想的に評価することで、システムとその相対的な制御の性能を評価することができます。また、弱点や必要な改善点の指摘にも役立ちます。このようなモデルの注目すべき点は、車両のパワートレイン、燃料電池とその補助装置、および制御装置の間の相互作用を予測する能力です。
Antoine Lepoil氏、Benoit Honel氏
さらに先へ
- シーメンスの専門家とIFP Energies NouvellesのJules Sery氏によるオンデマンド・ウェビナー「シミュレーションベースのアプローチを使用した燃料電池システムの性能評価」
- お客様の事例「OMB Saleri、Simcenterを使用してバルブの動作を予測し、革新的な製品を迅速に開発」
- ブログ記事「Simcenter Amesimでのグリーン水素製造シミュレーション」
- ブログ記事「水素モビリティの安全性を確保」
- 技術論文「大型燃料電池ハイブリッド・トラックの車載液体水素冷却エネルギー利用システム」