Kineo Collision Detector Version 7.0

Kineo Collision Detector (KCD) is a software component that performs high speed collision analysis on mesh surfaces (polyhedrons), point cloud data and wireframes. Its high performance makes it particularly well-suited to complex motion simulation environments. KCD version 7.0 includes the following new features:
New Analysis Type: Colliding Object Pair
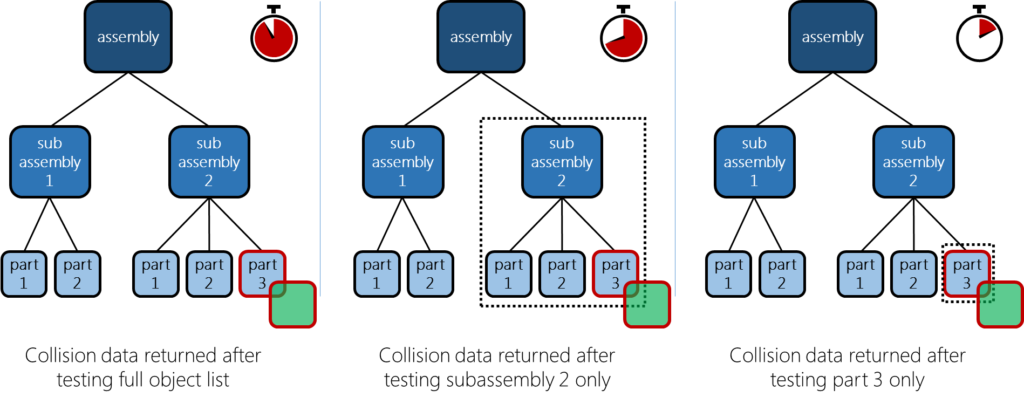
KCD analyses collisions between two user-defined groups of objects. A group is defined by a hierarchical object list (e.g. parts – subassemblies – assembly). This object list can be used, for example, to represent all the components of an articulated robot system, in order to analyse any and all collisions with the robot.
Version 7.0 introduces the option to compute all collisions only with a child of the object list. Collision analysis is then limited to a selected subset of the model (e.g. the robot tool) – this improves performance by removing the need to perform detailed collision analysis on the full object list. An example is illustrated below, where it is known that only a single part in the assembly may be colliding with an external part (shaded green).
New Collision Test: Point Cloud vs. Wireframe
KCD version 7.0 introduces collision detection between point clouds and wireframe geometry. Point clouds are typically obtained from optical scanning and may be used to import real world objects or scenes into the collision analysis environment. Wireframes may be used to represent simple structures in a scene, for example, robot cages.