Six Design Elements Are Key for Autonomous Vehicles
Each of these six major functional subsystems must be considered and carefully integrated to ensure autonomous operation.
By John Blyler
Engineers – and scientists, for that matter – deal with complexity by dividing it into smaller, more manageable pieces. This seemingly simple exercise, if done properly and with attention to integration details, will go a long way to ensuring the success of the final product. For autonomous vehicles, this partitioning of complexity into manageable bits must in some way include the following functional subsystems:
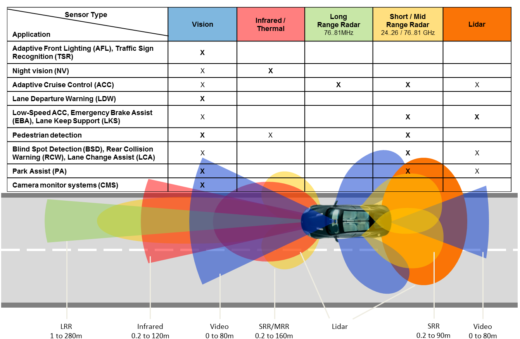
1. Sensors: design and reliable operation
Automobiles will not become autonomous without a vast array of sensors. Today, a single vehicle has from 60 to 100 sensors on board and that number will only increase as cars get “smarter.” Among all of these sensors, three types stand out as must-haves for autonomous driving — namely, LIDAR, radar and image cameras. The data from these will be used in large measure to determine the speed of objects and the distance between them. This data is essential for a smart vehicle to decide on the most energy-efficient and safest path to its destination, which leads to data processing considerations.
2. Sensor fusion
Currently, many vehicles with advanced driver assistance systems (ADAS) capabilities use relatively simple computers operating at low clock speeds with limited memory to run fairly simple code. Most of the sensor modules contain 8-16 bit processors that perform calculations on the raw data before passing some of that processed data onto high-end systems like collision control, cruise control, and so on. This sort of distributed compute architecture, where data processing happens at each sensor node, is problematic as it introduces latency during transfer of safety-critical information, increases cost and power consumption. A better approach is based on centralized raw data fusion, which is both the optimal architecture for deploying SAE Level 5 autonomous vehicles and one that scales down and allows carmakers and suppliers to build cost-effective Level 2-4 self-driving systems. There is an additional benefit to a centralized system — namely, improved emulation for OEMs on prototype development and production units. Advanced automotive electronics designs like sensor fusion present many challenges to the traditional PCB systems design flow. Connecting all of the autonomous car sensors, PCBs and mechanical systems is the job of the cabling system, which shall now be considered.
3. Electrical E/E architecture
Data and information flow constantly throughout an autonomous vehicle. The major data streams include raw sensor data from the environment, feedback control data to actuators and the engine, communication connectivity data and high bandwidth infotainment systems. These ever increasing sources of data — many of which generate high bandwidth flows such as from high-resolution cameras — directly impact the architecture of autonomous vehicle wiring, networks and device interfaces. That’s why the size of the automotive wiring harness market is projected to grow at a CAGR of 7.5% from 2016 to 2021, as reported by Markets-to-Markets.
4. Powertrain electrification
Powertrain electrification (hybrid or full electrification) is indispensable for autonomous vehicles. However, integrating vehicle autonomy with electrification will not be a simple additive exercise for the design and manufacturing teams of major OEMs. There are significant engineering challenges associated with electric powertrain design, reliability and performance. While vehicle autonomy presents additional challenges to powertrain electrification, it also offers unique opportunities to optimize electric powertrain size and energy management. The move toward electrification of the automotive industry means that electrical and electronics systems will be under tight scrutiny to ensure reliability of both hardware and software subsystems. This leads us to the next design consideration.
5. Vehicle safety and in-cabin experience
For autonomous vehicles, safety-critical functions of steering and braking will depend on electronic control units (ECU). One of the biggest challenges for ECU design engineers is to manage power (and hence thermal) load on electronics, especially in harsh automotive operation. Additionally, often overlooked in these thermal and reliability design activities at the component level are the performance and optimization of the larger system. From a systems perspective, integrating various ECU functionalities into one unit requires extensive requirement management, redesign simulation and integrated testing. Not to be forgotten is the infotainment system, which is transforming the vehicle into a living room on wheels or a mobile Internet-of-Things device. This will require LTE 4G- or 5G-capable connectivity technologies so that consumers can connect their mobile devices to the vehicle without hassle.
6. Vehicle connectivity
Automotive wiring networks and in-vehicle infotainment (IVI) systems are only part of the connectivity challenge. Weekly or even daily software updates to automotive operating systems, interface drivers and the like are becoming an essential part of automotive safety and security. Further, ongoing mandates by the U.S. Department of Transportation (DOT) are requiring designers to deal with vehicle-to-vehicle (V2V) communication systems. Automotive-grade, open-source platforms will securely and reliably manage the huge volumes of data flowing through in-vehicle infotainment (IVI) systems, deliver over-the-air (OTA) updates and V2V/X communications.
For a more detailed understanding of how these interdisciplinary and intersecting technical domain subsystems must come together in an integrated way to optimize a solution for the entire vehicle, please read the recent Mentor Graphics white paper: Key Engineering Challenges for Commercially Viable Autonomous Vehicles


Comments
Leave a Reply
You must be logged in to post a comment.
I think 5G will have a great role than merely connecting our mobile devices to cars. – Ben @ EdlavitchLaw.com