KineoWorks v7.2 simplifies parallel linkage simulation in robotics applications

KineoWorks version 7.2 introduces simplified, out-of-the-box support for modeling parallel linkages in articulated robots and other mechanical devices. Parallel linkages are easily created in KineoWorks by connecting two serial linkages that share a common joint – see the example below.
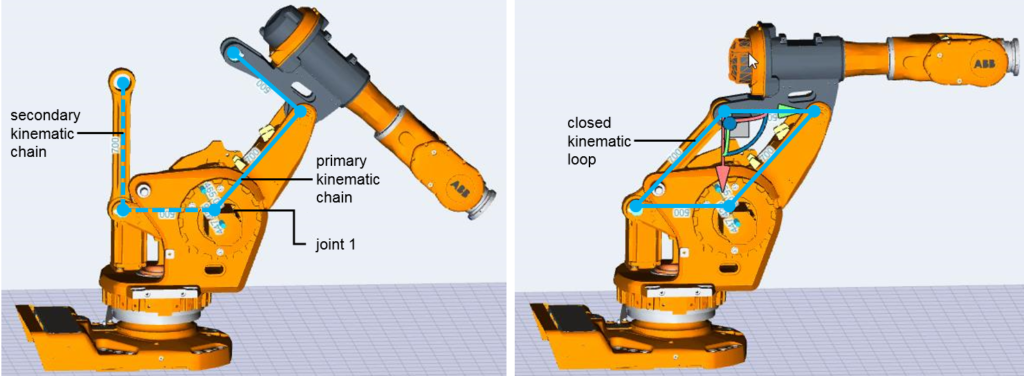
Parallel linkages offer several advantages in robotic systems. In the example above, the parallel linkage makes it possible for the robot tool to achieve the desired range of motion using an actuator (drive) located near the base of the robot (joint 1). If only a serial linkage were used, it would be necessary to position an actuator on a joint closer to the robot tool in order to achieve the same range of motion, thereby increasing the weight of the robot arm. Furthermore, parallel linkages can help to distribute the load on the robot tool, enabling higher pay-loads.
The video below shows KineoWorks simulating a parallel linkage. The system designer has full control over which joints in the parallel linkage should be active (controllable, driven by actuators) or passive. The resulting articulated system is then simulated in KineoWorks using both forward and inverse kinematics.
The new functionality is now available in the KineoWorks SDK. It is also implemented in our complementary standalone application, Kwik, for configuring and verifying robotic systems quickly and easily to accelerate your KineoWorks application development.
Further information:

