Kineo Flexible Cables Version 7.0

Kineo Flexible Cables is a software component for compliant cable simulation. It’s well suited to modeling the deformation and configuration of cables in robotics systems, such as pneumatic hoses and electrical cables, to minimize failure on the factory floor. Version 7.0 includes the following new features:
Enhanced dress pack simulation: cable retraction systems
The cables that supply energy and data to industrial robots need to be long enough to service the full range of articulated motion. When a robotic sub-system is not in a state of maximum extension, slack can form in the supply cables and the resulting loops may interfere with the robot and/or its operating environment.
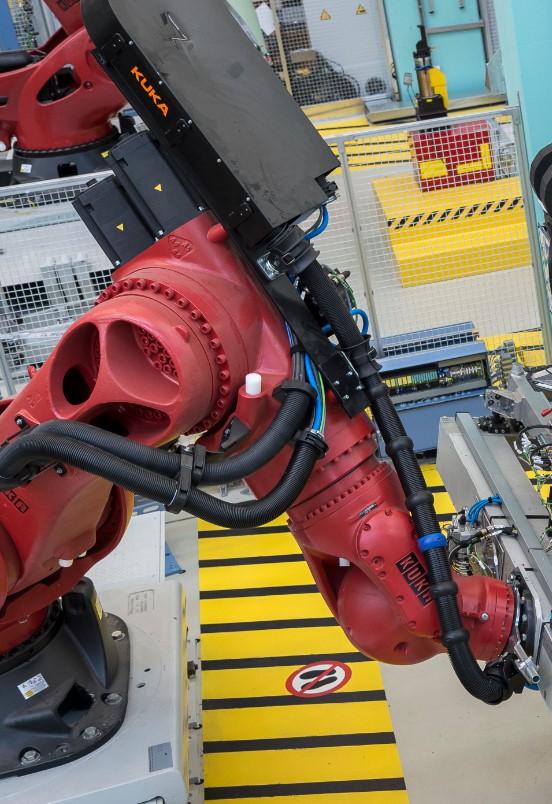
Dress packs with cable retraction systems support the robot’s full range of articulated motion, while minimizing undesirable cable looping by providing a safe zone for any slack in the cable. This is typically a secure housing that uses a spring to apply a retraction force that withdraws the cable whenever the robot is not taking up the slack.
Version 7.0 allows you to dynamically simulate such retraction systems by applying a retraction force between a point on the cable and a fixed point on the robot / retraction system.
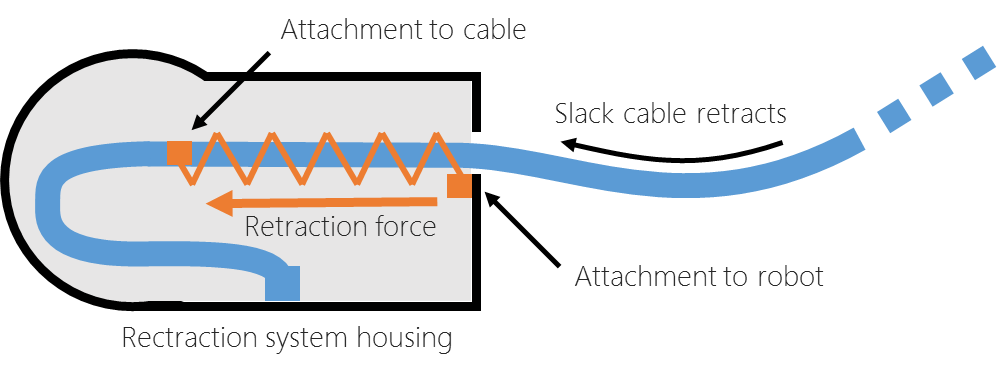
A wide variety of retraction systems can be configured – some examples are illustrated here:
Retraction-Retraction System – straight version

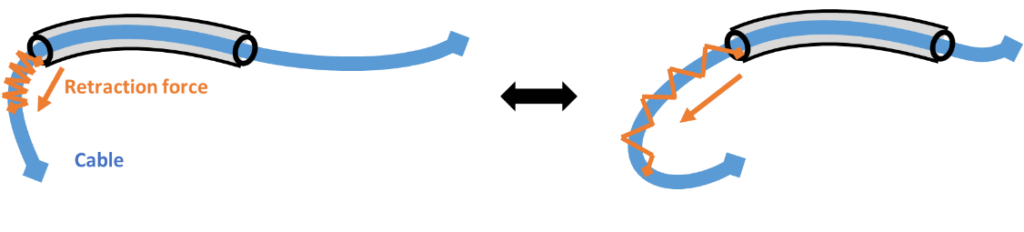
Retraction-Retraction System – curved version with internal spring

Retraction-Retraction System – curved version with external spring
Rotating Attachment
A new rotating attachment is now available for positioning cables. This behaves like a fixed cable attachment, but permits rotation around either of the following axes:
- Along the cable axis: The cable can rotate freely in the attachment to reduce twist – useful for simulating hooks through which the cable must pass, without constraining the twist.
- Transverse to the cable axis: The cable can rotate to reduce bending – this can be used to simulate situations where the cable goes through a ring that can rotate.
Enhanced performance for contact simulation
Version 7.0 delivers higher performance contact simulation, which improves application responsiveness when simulating cable systems on robots.

